[PYTHON] Solve three-dimensional PDEs with deep learning.
Environment and environment construction
Python == 3.6.8 TensorFlow == 1.15.3
This time, I developed the code using version 1 (TF1) of TensorFlow. TF1 only works with Python 3.6, so I installed Python 3.6.8 first. Install Numpy, Scipy, matplotlib, pyDOE from PyPI (pip command).
Prerequisites
This time we will solve the diffusion equation.
The diffusion equation is
Gaussian has the following local solution.
#Data generation-----------------------------------
xi = np.linspace(-5, 5, 100)
yi = np.linspace(-5, 5, 100)
X, Y = np.meshgrid(xi, yi)
ui = np.exp(-(X**2 + Y**2))
tti = np.zeros(10000)[:,None]
xxi = X.flatten()[:,None]
yyi = Y.flatten()[:,None]
uui = ui.flatten()[:,None]
x_initial = np.hstack([tti, xxi, yyi])
u_initial = uui
#plotting style-----------------------------------
fig = plt.figure(figsize = (8, 8))
ax = fig.add_subplot(111, projection="3d")
ax.plot_surface(X, Y, ui, cmap = "rainbow")
ax.set_xlabel("x")
ax.set_ylabel("y")
ax.set_zlabel("u")
plt.show()
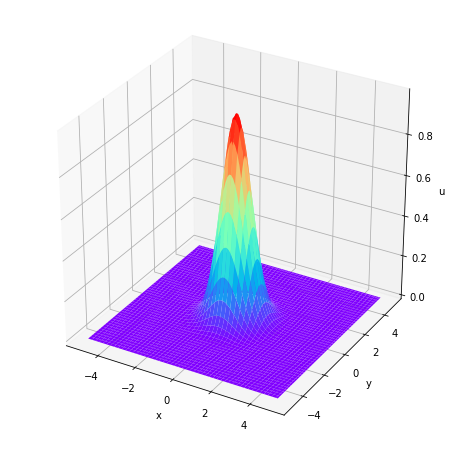
It suffices if a solution that spreads this is obtained.
Source code
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import scipy.io
from scipy.interpolate import griddata
from pyDOE import lhs
from mpl_toolkits.mplot3d import Axes3D
import time
import matplotlib.gridspec as gridspec
from mpl_toolkits.axes_grid1 import make_axes_locatable
import matplotlib.animation as animation
#Fixed randomly generated value---------------------------------
np.random.seed(1234)
tf.set_random_seed(1234)
class PhysicsInformedNN:
#Function to be executed when an instance is created
def __init__(self, X_u, u, X_f, layers, lb, ub):
self.lb = lb
self.ub = ub
self.t_u = X_u[:,0:1]
self.x_u = X_u[:,1:2]
self.y_u = X_u[:,2:3]
self.t_f = X_f[:,0:1]
self.x_f = X_f[:,1:2]
self.y_f = X_f[:,2:3]
self.u = u
self.layers = layers
self.weights, self.biases = self.initialize_NN(layers)
self.sess = tf.Session(config=tf.ConfigProto(allow_soft_placement=True, log_device_placement=True))
self.t_u_tf = tf.placeholder(tf.float32, shape=[None, self.t_u.shape[1]])
self.x_u_tf = tf.placeholder(tf.float32, shape=[None, self.x_u.shape[1]])
self.y_u_tf = tf.placeholder(tf.float32, shape=[None, self.y_u.shape[1]])
self.u_tf = tf.placeholder(tf.float32, shape=[None, self.u.shape[1]])
self.t_f_tf = tf.placeholder(tf.float32, shape=[None, self.t_f.shape[1]])
self.x_f_tf = tf.placeholder(tf.float32, shape=[None, self.x_f.shape[1]])
self.y_f_tf = tf.placeholder(tf.float32, shape=[None, self.y_f.shape[1]])
self.u_pred = self.net_u(self.t_u_tf, self.x_u_tf, self.y_u_tf)
self.f_pred = self.net_f(self.t_f_tf, self.x_f_tf, self.y_f_tf)
self.loss = tf.reduce_mean(tf.square(self.u_tf - self.u_pred)) + \
tf.reduce_mean(tf.square(self.f_pred))
self.optimizer = tf.contrib.opt.ScipyOptimizerInterface(self.loss, method = 'L-BFGS-B',
options = {'maxiter': 50000,
'maxfun': 50000,
'maxcor': 50,
'maxls': 50,
'ftol' : 1.0 * np.finfo(float).eps})
init = tf.global_variables_initializer()
self.sess.run(init)
#Initial weight and bias generation
def initialize_NN(self, layers):
weights = []
biases = []
num_layers = len(layers)
for l in range(0, num_layers-1):
W = self.xavier_init(size=[layers[l], layers[l+1]])
b = tf.Variable(tf.zeros([1,layers[l+1]], dtype=tf.float32), dtype=tf.float32)
weights.append(W)
biases.append(b)
return weights, biases
#Generates a random initial value of weight that follows a truncated normal distribution
def xavier_init(self, size):
in_dim = size[0]
out_dim = size[1]
xavier_stddev = np.sqrt(2/(in_dim + out_dim))
return tf.Variable(tf.truncated_normal([in_dim, out_dim], stddev=xavier_stddev), dtype=tf.float32)
#Building a neural network
def neural_net(self, X, weights, biases):
num_layers = len(weights) + 1
H = 2.0*(X - self.lb)/(self.ub - self.lb) - 1.0
for l in range(0, num_layers-2):
W = weights[l]
b = biases[l]
H = tf.tanh(tf.add(tf.matmul(H, W), b))
W = weights[-1]
b = biases[-1]
return tf.add(tf.matmul(H, W), b)
#Neural network of output u
def net_u(self, t, x, y):
return self.neural_net(tf.concat([t,x, y],1), self.weights, self.biases)
#Neural network of output f(Automatic differentiation)
def net_f(self, t, x, y):
u = self.net_u(t, x, y)
u_t = tf.gradients(u, t)[0]
u_x = tf.gradients(u, x)[0]
u_xx = tf.gradients(u_x, x)[0]
u_y = tf.gradients(u, y)[0]
u_yy = tf.gradients(u_y, y)[0]
#>>>>>>>>The method you want to solve::::::::::::::::::::::::::::::::
return u_t - u_xx - u_yy
#Callback function definition
def callback(self, loss):
print('Loss:', loss)
#Neural network training
def train(self):
tf_dict = {self.x_u_tf: self.x_u,
self.t_u_tf: self.t_u,
self.y_u_tf: self.y_u,
self.u_tf: self.u,
self.x_f_tf: self.x_f,
self.t_f_tf: self.t_f,
self.y_f_tf: self.y_f}
self.optimizer.minimize(self.sess, feed_dict = tf_dict,
fetches = [self.loss], loss_callback = self.callback)
#Output u grid points(X_star)Assign the value of to a variable
def predict(self, X_star):
return self.sess.run(self.u_pred, {self.t_u_tf: X_star[:,0:1],
self.x_u_tf: X_star[:,1:2],
self.y_u_tf: X_star[:,2:3]})
if __name__ == "__main__":
#>>>>>>>Configuration--------------------------------------------------
N_u = 1000 #Number of training data for initial conditions and boundary conditions
N_f = 30000 #Number of collocation points
x0 = -5 #Starting point of x
x1 = 5 #End of x
y0 = -5 #Starting point of y
y1 = 5 #End of y
t0 = 0 #Starting point of t
t1 = 1 #End point of t
layers = [3, 20, 20, 20, 20, 20, 20, 20, 20, 1] #Structure of NN
N = 200 #x,Number of divisions of y
Nt = 100 #Number of divisions of t
#>>>>>>>Configuration--------------------------------------------------
#Initial conditions------------------------------------------------------
xi = np.linspace(x0, x1, N)
yi = np.linspace(y0, y1, N)
Xi, Yi = np.meshgrid(xi, yi)
ui = np.exp(-(Xi**2 + Yi**2))
tti = np.zeros(N*N)[:,None]
xxi = Xi.flatten()[:,None]
yyi = Yi.flatten()[:,None]
uui = ui.flatten()[:,None]
X_u_train = np.hstack([tti, xxi, yyi])
u_train = uui
#Extract as many initial condition data as Nu----------------------------------
idx = np.random.choice(X_u_train.shape[0], N_u, replace=False)
X_u_train = X_u_train[idx, :]
u_train = u_train[idx,:]
#Generation of 3D coordinate grid points---------------------------------------------
x = np.linspace(x0, x1, N)
y = np.linspace(y0, y1, N)
t = np.linspace(t0, t1, Nt)
X, Y, T = np.meshgrid(x, y, t)
tt = T.flatten()[:,None]
xx = X.flatten()[:,None]
yy = Y.flatten()[:,None]
X_star = np.hstack([tt, xx, yy])
#Generation of collocation points----------------------------------------
lb = np.array([t0, x0, y0]) #<lower bound>
ub = np.array([t1, x1, y1]) #<upper bound>
X_f_train = lb + (ub-lb)*lhs(3, N_f)
X_f_train = np.vstack((X_f_train, X_u_train))
#Pass data to the PhysicsInformedNN class------------------------------
model = PhysicsInformedNN(X_u_train, u_train, X_f_train, layers, lb, ub)
#Execution of operation-------------------------------------------------------
start_time = time.time()
model.train()
run_time = time.time() - start_time
print('Training time:', run_time)
#Store the operation result in a variable--------------------------------------------
u_pred = model.predict(X_star)
#Plotting style-----------------------------------------------
ims = [] #gif animation storage box
fig = plt.figure()
for j in range(Nt):
U = []
for i in range(N*N):
U = np.append(U, u_pred[Nt*i + j])
U = U.reshape(N, N)
im = plt.imshow(U,interpolation='nearest', extent=[x0, x1, y0, y1],
cmap='rainbow', vmin=0, vmax=1)
ims.append([im])
ani = animation.ArtistAnimation(fig, ims, interval=50)
plt.colorbar()
ani.save("output.gif", writer="imagemagick")
plt.show()
Execution result
The following gif animation was obtained.
Execution result in another equation
The advection equation was solved as another equation. Equation: $ u_t --u_x -u_y = 0 $ Initial condition: $ u (x, y, 0) = exp (-(x ^ 2 + y ^ 2)) $
reference
I referred to the following papers. Physics Informed Deep Learning (Part I): Data-driven Solutions of Nonlinear Partial Differential Equations
Recommended Posts