Enfin ... Créez un contrôleur radio en utilisant python sur Raspberry Pi 3! (Le moteur se déplace lorsque le bouton est enfoncé)
introduction
Je m'appelle Ryosuke Kamei et je suis consultant en informatique basé sur l'idée du "doux IT"! Actuellement, mon travail est en amont, axé sur l'analyse des exigences et la définition des exigences, mais j'écris aussi des programmes! Dans le cadre de nos activités informatiques conviviales, nous présenterons «Raspberry Pi 3» (communément appelé «Raspberry Pi 3»), qui a pour philosophie de «fournir des PC bon marché qui peuvent être programmés à des fins éducatives»!
Jusqu'à présent, j'ai touché Razupai parce que je me demandais ce que ça ferait d'utiliser Razupai pour les vacances d'été de ma fille (11 et 8 ans)! (Je suis une fille, mais c'est un radiocon? Comment l'élever ... Fufufu) Du coup, je ne sais pas s'il choisira un contrôleur radio (rires), mais j'essaierai de faire un prototype.
Cette fois, j'écrirai jusqu'au point où le moteur se déplace en appuyant sur le bouton!
Il existe également un article utilisant un interrupteur magnétique (interrupteur de plomb)! Le moteur se déplace tout en rapprochant l'aimant Le moteur se déplace lorsque l'aimant est rapproché et s'arrête automatiquement
[Magazine Razpai - Numéro de juin 2016 Dossier spécial 1 Schéma de câblage des pièces populaires d'Akiba Best 17](https://www.amazon.co.jp/ Magazine Razpai - Numéro de juin 2016-Nikkei BP PC Best Mook- Nikkei Linux-ebook / dp / B01EH2RX42 / ref = as_li_ss_tl? ie = UTF8 & dpid = 61P3o6Agz + L & dpSrc = sims & prest = OU09__BG0,0,0,0_FMpng_AC_UL160_SR120,160 & psc = 1 & refRID = 31SKG5E0DGKBSF9BWNGV & linkCode = LV1 & tag = sr2smail-22 & linkid = 18fd04738627edef8d6fffd6c9b8f9c2) [Razpai Magazine-Août 2016 Special Feature 1 Basic Patterns of Electronic Work 12](https://www.amazon.co.jp/%E3%83%A9%E3%82%BA%E3%83%91 % E3% 82% A4% E3% 83% 9E% E3% 82% AC% E3% 82% B8% E3% 83% B3-2016% E5% B9% B48% E6% 9C% 88% E5% 8F% B7 -% E6% 97% A5% E7% B5% 8CBP% E3% 83% 91% E3% 82% BD% E3% 82% B3% E3% 83% B3% E3% 83% 99% E3% 82% B9% E3% 83% 88% E3% 83% A0% E3% 83% 83% E3% 82% AF-% E6% 97% A5% E7% B5% 8CLinux / dp / 4822237710 / ref = as_li_ss_tl? Ie = UTF8 & qid = 1471057119 & sr = 8-4 & mots-clés =% E3% 83% A9% E3% 82% BA% E3% 83% 91% E3% 82% A4 & linkCode = ll1 & tag = sr2smail-22 & linkId = c42c3f78bd8af3af1414020a400090fe) J'étudie et applique tout en regardant. C'était très utile!
procédure
- Câblage
- Programmez Raspycon_ver1.py
- Exécutez le programme
1. Câblage
Si vous obtenez une image comme celle-ci, en vous référant à l'image du circuit

J'ai aussi fait une vidéo
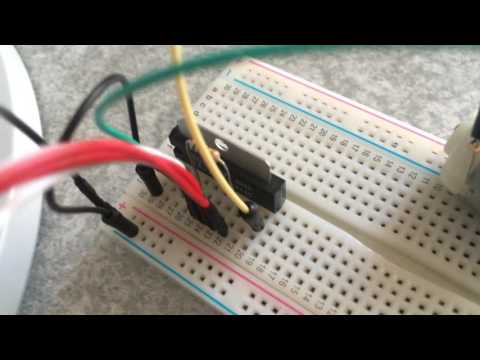
J'ai essayé de le réveiller dans le texte. Câblage vu de la tarte à la râpe
--Rasppie 1st terminal (3.3V) - 8ème broche du pilote de moteur (Vs) --Rasppie 2nd terminal (5V) - 7ème broche du pilote du moteur (Vcc) --Raspeye 16th terminal (GPIO23) --Motor driver 5ème broche (IN1) --Rasppie 18ème borne (GPIO24) - 6ème broche du pilote de moteur (IN2)
- Borne Raspeye n ° 6 (GND) - Broche n ° 1 du pilote de moteur (GND) - Côté négatif de la batterie --Raspai 11ème borne (GPIO17) - Commutateur de bouton côté gauche - Commutateur de bouton côté droit --Résistance (1kΩ) --Raspai 9ème borne (GND)
Câblage vu du pilote du moteur
--Pilote moteur n ° 4 (Vref) --Résistance 5,1 kΩ --Pilote moteur n ° 8 (Vs) --Moteur n ° 2 (OUT1) --Moteur CC --Pilote moteur n ° 10 (OUT2) --Moteur CC
Autres (non inclus dans les images et vidéos)
--Condenseur - Moteur à courant continu
2. Programmez Raspycon_ver1.py
La source est téléchargée sur GitHub, veuillez donc l'utiliser comme vous le souhaitez.
Cloner avec git
$ git clone https://github.com/RyosukeKamei/raspberrypi3.git
Raspycon_ver1.py
#Bibliothèque qui contrôle GPIO
import wiringpi
#Bibliothèque de minuterie
import time
#Numéro du terminal GPIO auquel le commutateur à bouton est connecté
button_pin = 17 #Terminal 11
#Paramètres du terminal GPIO
motor1_pin = 23 #Terminal 16
motor2_pin = 24 #Terminal 18
#Initialisation GPIO
wiringpi.wiringPiSetupGpio()
#Mettre le commutateur à bouton en mode d'entrée (0)
wiringpi.pinMode( button_pin , 0 )
#Pilote de moteur réglé sur le mode de sortie (1)
wiringpi.pinMode( motor1_pin, 1 )
wiringpi.pinMode( motor2_pin, 1 )
#Définir l'état lorsque rien n'est connecté au terminal
# 3."2" (pull-up) pour 3V
#(Réglé sur "1" pour 0V (pull-down))
wiringpi.pullUpDnControl( button_pin , 2 )
#Pendant que le traitement devient la plage de la boucle lorsque le caractère est abaissé
while True:
#Lire l'état du terminal GPIO
#Appuyez sur le bouton et allez tout droit
#L'état GPIO est 0V(0)Comparer
if( wiringpi.digitalRead(button_pin) == 1 ):
#Lorsque le bouton est relâché, "3".3V(1)」
#(Il est difficile de comprendre qu'il est arrêté quand il est 1)
print ("Arrêtez")
#Arrêtez le moteur
wiringpi.digitalWrite( motor1_pin, 1 )
wiringpi.digitalWrite( motor2_pin, 0 )
else:
#Lorsque le bouton est enfoncé, "0V"(0)」
print ("Allez tout droit")
#Faire tourner le moteur
wiringpi.digitalWrite( motor1_pin, 1 )
wiringpi.digitalWrite( motor2_pin, 1 )
time.sleep(0.5)
3. Exécutez le programme
J'ai enregistré la vidéo de son mouvement.

Le moteur se déplace en appuyant sur le bouton
$ sudo python3 Raspycon_ver1.py
Il semble intéressant d'utiliser un interrupteur magnétique (interrupteur principal), veuillez donc vous référer également à l'article suivant ~ Le moteur se déplace tout en rapprochant l'aimant Le moteur se déplace lorsque l'aimant est rapproché et s'arrête automatiquement
plan du site
Jouons avec Raspberry Pi 3 et python
Installation du Raspberry Pi 3 → LAN sans fil → Entrée / sortie japonaise → opération depuis Mac Programmation avec programmation Node-RED avec Raspberry Pi 3 et programmation normale Allumez la LED avec python sur Raspberry Pi 3 (Hello World) Détecter l'état du commutateur avec Raspberry Pi 3 Exécutez un servomoteur en utilisant python sur Raspberry Pi 3 Contrôlez le moteur avec un pilote de moteur en utilisant python sur Raspberry Pi 3! Détectez l'interrupteur à glissière à l'aide de python sur Raspberry Pi 3! Détectez les commutateurs magnétiques à l'aide de python sur Raspberry Pi 3! Détectez la température en utilisant python sur Raspberry Pi 3! Raspberry Pi 3 utilise python pour faire sonner le buzzer! Détectez les signaux analogiques avec un convertisseur A / N en utilisant python sur Raspberry Pi 3! Détectez la "luminosité" en utilisant python sur Raspberry Pi 3! Détectez la "température (en utilisant le convertisseur A / N)" en utilisant python sur Raspberry Pi 3! Sortie vers "7 segments LED" en utilisant python sur Raspberry Pi 3! Utilisez python sur Raspberry Pi 3 pour éclairer la LED avec le contrôle du commutateur! Utilisez python sur Raspberry Pi 3 et allumez la LED quand il fait noir! Enfin ... Créez un contrôleur radio en utilisant python sur Raspberry Pi 3! (Le moteur bouge en appuyant sur le bouton)
Règles axées sur le développement piloté par les tests
Règles de codage "Écrivons du code doux" (FuelPHP) Règles de dénomination "Membres sympathiques pour vous-même, conviviaux pour l'équipe et invisibles après 3 mois"
Développement d'applications Web avec Docker + Python
Construction d'environnement facile à développer (Docker + PHP)
Lier l'environnement PHP + Eclipse à Apache à l'aide de Docker Création d'un environnement de développement Fuel PHP à l'aide de Docker Création d'un squelette CRUD à l'aide des paramètres initiaux de l'environnement de développement FuelPHP à l'aide de Docker et de l'échafaudage Migration de la base de données FuelPHP