Let's look at a differential equation that cannot be solved normally in Python
Euler method
When $ \ dot {x} = f (x) $, I would like to find a function $ g $ that ideally integrates $ x $ over time so that $ x = g (t) $. However, analytical integration is not possible in nonlinear systems. Therefore, let us consider solving it numerically by discretizing the time. It would be good if we could find a numerical value similar to the integral of $ f (x) $ over time for each t. Therefore, the Euler method, which is an application of the segmented quadrature method that combines rectangles, can be used.
If you take a small time width $ \ Delta {t} $ and find the area of a rectangle with a height of $ f (x_0) $ and a width of $ \ Delta {t} $, you can find the integral value in that time width. A value close to the solution $ g (t) $) is obtained. So, if you use this and consider the value $ x_1 $ corresponding to the place where you advanced by $$ Delta {t} $ from the initial value,
However, since this is a method of finding the next approximate value from the approximate value, errors will accumulate more and more. In order to improve the accuracy of the approximation, we will take a closer look at the area of the rectangle.
Modified Euler method
A simple idea is to use the average height of the rectangle with $ f (x_ {n + 1}) $ instead of just $ f (x_n) $. This is called the modified Euler method. The error converges faster than the Euler method, but the theory of computation of the error is not well understood. If you imagine a monotonous function in the $ \ Delta {t} $ interval, it's easy to see that this will make it stick out of the rectangle and reduce scraping.
Runge-Kutta method
The Euler method adopted one end (for the younger one) and the modified Euler method adopted both ends as the height of a rectangle, but the Runge-Kutta method is a more elaborate selection of the numerical values to be adopted. The runge-Kutta method of the fourth order is just right in terms of the balance with the amount of calculation. In the quaternary Runge-Kutta method, the rectangular values are calculated for the four points in the interval, and the integrated values in the interval are calculated by averaging with weights. Specifically as follows
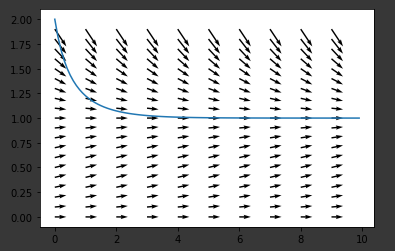
Often used is Runge-Kutta to draw the solution trajectory when given the most interesting initial value many times like a graph of a function, and give various other initial values to Runge- You can grasp the whole atmosphere by trying Kutta only once for each and drawing it as a vector field or a tilt field. I will implement it below.
import numpy as np
import matplotlib.pyplot as plt
#Define the function you want to look up
def dotx(x):
return x*(1-x)
#Runge-Kutta method-Plot on x plane
def rk4th(x0, n, dt):#x0:Initial value, n: t range, dt: step width
t=0
x=x0
xvalues=[]
tvalues=np.arange(0,n,dt)
scope=len(tvalues)#Keep the number of elements unified with this
#Apply RungeKutta to dotx and draw a trajectory corresponding to x0
for i in range(scope):
xvalues.append(x)
k1 = dotx(x)*dt
k2 = dotx(x+k1/2)*dt
k3 = dotx(x+k2/2)*dt
k4 = dotx(x+k3)*dt
x = x + (k1+ 2*k2 + 2*k3 + k4)/6
t += dt
#Draw a hard spot by finding it from other initial values
T, X = np.meshgrid(
np.arange(0,n,1),
np.arange(0,2,0.1)
)
k1 = dotx(X)*dt
k2 = dotx(X+k1/2)*dt
k3 = dotx(X+k2/2)*dt
k4 = dotx(X+k3)*dt
V = (k1+2*k2+2*k3+k4)/6
plt.quiver(T,X,dt,V)
plt.plot(tvalues, xvalues)
plt.show()
rk4th(2, 10, 0.1)
The results are shown below. This is really a slope, not a vector, because the horizontal axis is t.
Recommended Posts