[PYTHON] Verwenden Sie die Kamerakalibrierungsdatei mit OpenCvSharp4
Einführung
Guten Abend Ich habe die WEB-Kamera mit OpenCvSharp4 kalibriert, daher werde ich sie als Memorandum belassen. Ich verstehe die Theorie und die Argumentation der Kalibrierung selbst immer noch nicht, daher hat der Code einfach funktioniert. .. ..
Umgebung
WEB-Kamera: FullHD 1080P (2-Millionen-Pixel-Kamera) Erstellung der Kalibrierungsdatei: Python (Python-OpenCV) Berechnung der Kameraobjektivverzerrung: C # (opencvsharp4.windows)
Erstellen einer Kamera-Kalibrierungs-Yaml-Datei mit Python
Ich wollte unbedingt eine Kalibrierungsberechnung mit Opencvsharp durchführen Es ist schwierig, die 3er-Samples umzuleiten, und es war unwahrscheinlich, dass ich mit den 4er-Samples auf meinem Niveau konkurrieren konnte, daher werde ich ruhig mit Python mit Samples rechnen.
Erstellen Sie den folgenden Code und führen Sie ihn aus, indem Sie auf [hier] verweisen (https://qiita.com/ReoNagai/items/5da95dea149c66ddbbdd). Der größte Teil des Kernteils ist das Kopieren. .. .. Nein, ich weiß das wirklich zu schätzen.
CalcCalibration.py
import os
import sys
import numpy as np
import cv2
from time import sleep
from datetime import datetime
FILE_NAME = "calib.yml"
#Anzahl der Referenzbilder
REFERENCE_IMG = 40
#Die Größe einer Seite des Quadrats[cm]
SQUARE_SIZE = 2.0
#Anzahl der Schnittpunkte
PATTERN_SIZE = (8, 13)
def main():
"""
Hauptfunktion
:return:
"""
calc_camera() #Berechnen Sie die Kamera-Verzerrung
def calc_camera():
"""
Funktion zur Berechnung der Kameraverzerrung
:return:
"""
pattern_points = np.zeros((np.prod(PATTERN_SIZE), 3), np.float32) #Chestboard (X.,Y,Z) Festlegen von Koordinaten(Z=0)
pattern_points[:, :2] = np.indices(PATTERN_SIZE).T.reshape(-1, 2)
pattern_points *= SQUARE_SIZE
obj_points = []
img_points = []
capture = cv2.VideoCapture(0)
#Geben Sie die Auflösung an
#Stellen Sie die Breite des Kamerabildes auf 1920 ein
capture.set(cv2.CAP_PROP_FRAME_WIDTH, 1920)
#Stellen Sie die vertikale Breite des Kamerabildes auf 1080 ein
capture.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080)
while len(obj_points) < REFERENCE_IMG:
#Holen Sie sich ein Bild
ret, img = capture.read()
height = img.shape[0]
width = img.shape[1]
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#Erkennt Schachbrettecken
ret, corner = cv2.findChessboardCorners(gray, PATTERN_SIZE)
#Wenn es eine Ecke gibt
if ret:
print("detected coner!")
print(str(len(obj_points) + 1) + "/" + str(REFERENCE_IMG))
term = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)
cv2.cornerSubPix(gray, corner, (5, 5), (-1, -1), term)
img_points.append(corner.reshape(-1, 2)) #Methode anhängen: Fügen Sie am Ende der Liste ein Faktorobjekt hinzu
obj_points.append(pattern_points)
cv2.imshow('image', img)
#Warten Sie 200 ms, da dies jedes Mal beurteilt wird. Es ist hier, um sich zu verzögern
if cv2.waitKey(200) & 0xFF == ord('q'):
break
print("calculating camera parameter...")
#Interne Parameter berechnen
rms, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(obj_points, img_points, gray.shape[::-1], None, None)
#Berechnungsergebnis anzeigen
print("RMS = ", rms)
print("mtx = \n", mtx)
print("dist = ", dist.ravel())
#In yml speichern
f = cv2.FileStorage(FILE_NAME, flags=1)
f.write('mtx', mtx)
f.write('dist', dist)
# f.write('translation', rvecs)
# f.write('distortion', tvecs)
f.release()
if __name__ == '__main__':
main()
Die Anzahl der Referenzbilder, die Größe einer Seite des Quadrats, die Anzahl der Schnittpunkte und die Einstellungen für die Kameraauflösung Je nach Umgebung einstellen. Dieses Mal habe ich [hier] erstellt (https://drive.google.com/file/d/1A56mjyobKN3cLkFkPgokO8qCoDXUdXIC/view?usp=sharing), es im Format A4 gedruckt und auf einer Kunststoffplatte verwendet. Da eine Seite des Quadrats 20 mm beträgt, beträgt sie 2,0 cm, und die Schnittpunkte sind 8 in horizontaler Richtung und 13 in vertikaler Richtung. Die Verzerrungsberechnung wird durchgeführt, während Sie sich gleichmäßig bewegen, wie in ↓ gezeigt. 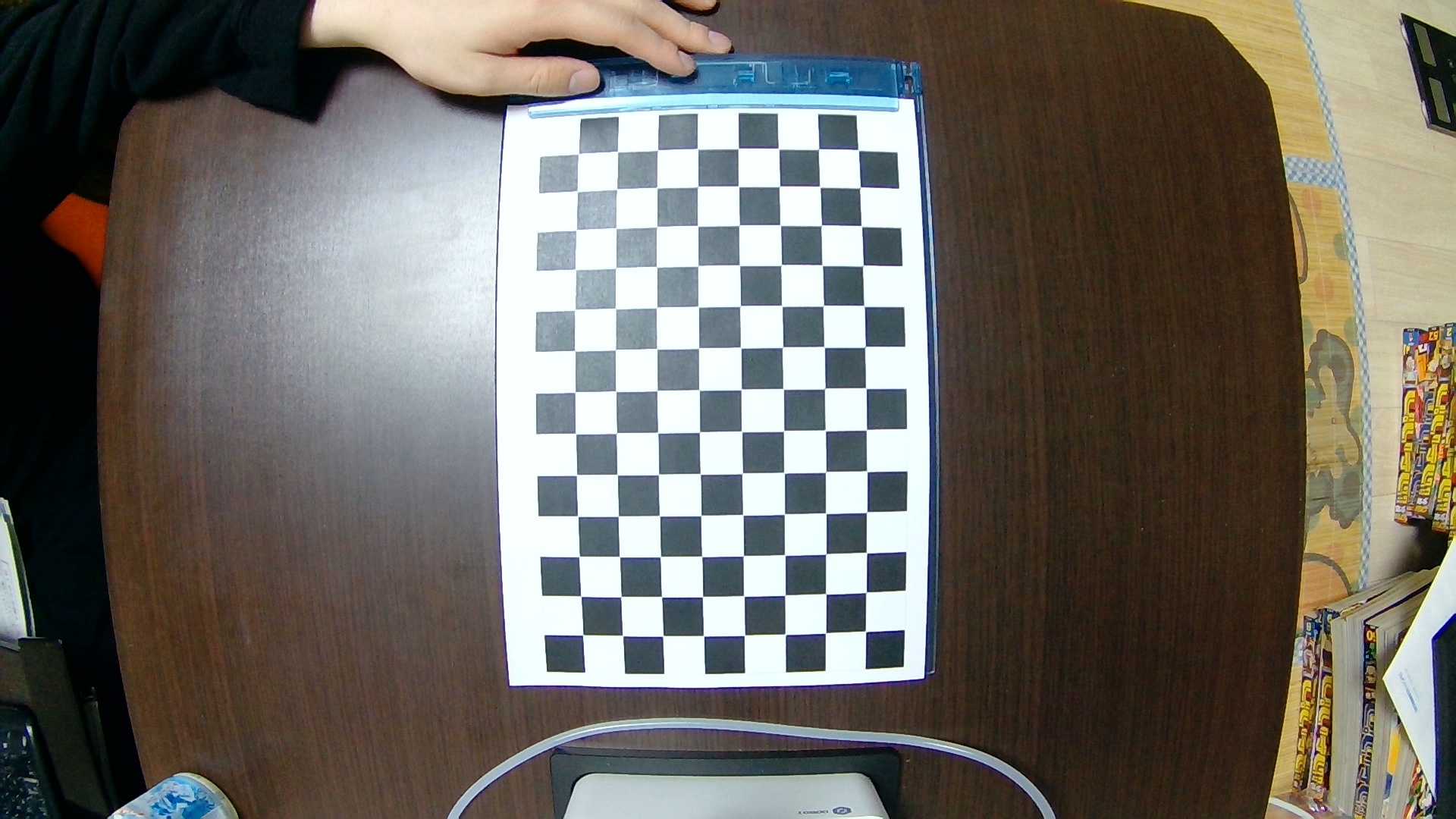  
Wenn die Ecken von 40 Schachbrettern erkannt werden können, wird die Verzerrung berechnet.
Sie können das Ergebnis wie unten gezeigt überprüfen. Gleichzeitig können Sie sehen, dass "calib.yml" ausgegeben wird.

calib.yml
%YAML:1.0
---
mtx: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 7.7958988893525259e+02, 0., 9.8266449367809537e+02, 0.,
7.7847873908657630e+02, 5.7636196300911377e+02, 0., 0., 1. ]
dist: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ -1.8378651673412880e-01, 4.1014929211162864e-02,
-1.2046811513395908e-03, -4.8516056956278577e-04,
-4.8595996923656995e-03 ]
Lesen Sie die Yaml-Datei mit OpenCvSharp4 und führen Sie eine Verzerrungskorrektur durch
Installieren Sie zunächst opencvsharp. Aus irgendeinem Grund verursachte OpenCvSharp4 auf der Oberseite zur Laufzeit einen DLL-Ladefehler. Installieren Sie OpenCvSharp4.WIndows.
 Bereiten Sie nach Abschluss der Installation "calib.yml" und ein Image zur Überprüfung vor.
Führen Sie den folgenden Code aus.
Bereiten Sie nach Abschluss der Installation "calib.yml" und ein Image zur Überprüfung vor.
Führen Sie den folgenden Code aus.
Program.cs
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using OpenCvSharp;
namespace CameraCalibrationSample
{
class Program
{
static void Main(string[] args)
{
const string ImagePath = @"./img/";
const string YamlFilePath = @"calib.yml";
// (1)Kalibrierungsbild(Vor der Korrektur)Wird geladen
string[] imagePaths = System.IO.Directory.EnumerateFiles(ImagePath, "*", System.IO.SearchOption.AllDirectories).ToArray();
int imageNum = imagePaths.Length;
Mat[] srcImg = new Mat[imageNum];
for (int i = 0; i < imageNum; i++)
{
srcImg[i] = Cv2.ImRead(imagePaths[i], ImreadModes.Color);
Mat src = Cv2.ImRead(imagePaths[i], ImreadModes.Color);
//Lesen Sie die yml-Datei und erhalten Sie die Berechnungsparameter
using (var fs = new FileStorage(YamlFilePath, FileStorage.Mode.Read))
{
var mtx = fs["mtx"].ReadMat();
var dist = fs["dist"].ReadMat();
Mat calib = new Mat();
Cv2.Undistort(src, calib, mtx, dist);
Cv2.ImShow("src", srcImg[i]);
Cv2.ImShow("calib", calib);
OpenCvSharp.Cv2.WaitKey(0);
}
}
Cv2.DestroyAllWindows();
}
}
}
Wenn die Verzerrungsberechnung gut funktioniert, sieht es wie ↓ aus.
・ Vor der Korrektur

·Nach der Korrektur

Sie können sehen, dass es richtig korrigiert wurde. Du hast es geschafft! (^ O ^)
Am Ende
Es gibt einige Unterschiede im Code zwischen der 3. und 4. Serie, und selbst wenn ich versuchte, das Beispiel der alten Version mit 4 neu zu schreiben, war der Schwellenwert hoch. .. .. Es gibt Beispielquellen für C ++ und Python auf der offiziellen Website des ursprünglichen OpenCV, aber es ist ziemlich schwierig für mich, sie durch C # zu ersetzen. Dieses Mal habe ich das Schreiben des Berechnungsteils in C # aufgegeben und beschlossen, ihn nur dann in C # zu schreiben, wenn die Korrekturparameter verwendet werden. Trotzdem hat es lange gedauert, da die Art und Weise, Dateispeicher zu schreiben, zwischen 3 und 4 Serien sehr unterschiedlich war. Wenn Sie sich Wiki richtig ansehen, können Sie es sofort sehen, aber es hat lange gedauert, es zu bemerken, da ich nur 3 Serienmuster verfolgt habe. Ich hätte es richtig untersuchen sollen.
Referenzquelle
Danke für die obige URL. https://qiita.com/ReoNagai/items/5da95dea149c66ddbbdd https://github.com/shimat/opencvsharp/wiki/FileStorage https://stackoverrun.com/ja/q/11850575 http://hima-tubusi.blogspot.com/2016/02/opencvsharp_3.html https://qiita.com/Kazuhito/items/cc6b8a0bd75cf9689bf9 https://www.learnopencv.com/camera-calibration-using-opencv/
Recommended Posts