Verwendung des Python-Wrappers PyRealsense von Realsense mit Jetson Nano
Was ist PyRealsense (pyrealsense2)?
Ein Wrapper-Programm für den Umgang mit Intels Tiefenkamera Realsense in Python. Mit Python können Sie ganz einfach Realsense-Bilder und Tiefeninformationen abrufen.
Dies ist sehr praktisch, wenn Sie Tiefeninformationen erfassen möchten, nachdem Sie ein Bild mit tiefem Lernen mit Python mit Realsense erkannt haben.
Für X86-PCs können Sie es einfach mit pip install pyrealsense installieren, aber Arm's Jetson Nano erfordert etwas Einfallsreichtum, daher werde ich kurz die Setup-Methode und -Verwendung vorstellen.
In diesem Artikel geht Realsense von D435 aus.
Erstellen Sie Librealsense aus der Quelle
Um PyRealsense mit Jetson Nano verwenden zu können, müssen Sie den Realsense-Treiber Librealsense aus dem Quellcode erstellen.
Installation der erforderlichen Bibliotheken
Installieren Sie die erforderlichen Bibliotheken.
$ sudo apt-get update
$ sudo apt-get install -y cmake
Hinweis: Ich habe es nicht von Grund auf neu eingerichtet. Vielleicht brauche ich noch andere Bibliotheken. Ich werde es hinzufügen, sobald es klar wird.
Wenn Sie tiefes Lernen durchführen möchten, lesen Sie bitte den folgenden Artikel.
Erstellen und installieren Sie Librealsense
Laden Sie (git clone) Librealsense mit dem folgenden Befehl herunter, erstellen und installieren Sie es.
$ cd && git clone https://github.com/IntelRealSense/librealsense.git
$ cd librealsense
$ mkdir build
$ cd build
$ cmake ../ -DBUILD_PYTHON_BINDINGS:bool=true
$ make -j4
$ sudo make install
Udev-Einstellungen
Verwenden Sie den folgenden Befehl, um udev so einzurichten, dass Realsense über USB erkannt wird.
$ cd ~/librealsense
$ ./scripts/setup_udev_rules.sh
Pfadeinstellung
Fügen Sie einen Pfad hinzu.
$ export PYTHONPATH=$PYTHONPATH:/usr/local/lib
Sie müssen den Pass jedes Mal hinzufügen. Wenn es problematisch ist, fügen Sie den obigen Befehl zu ~ / .bashrc hinzu.
Funktionsprüfung
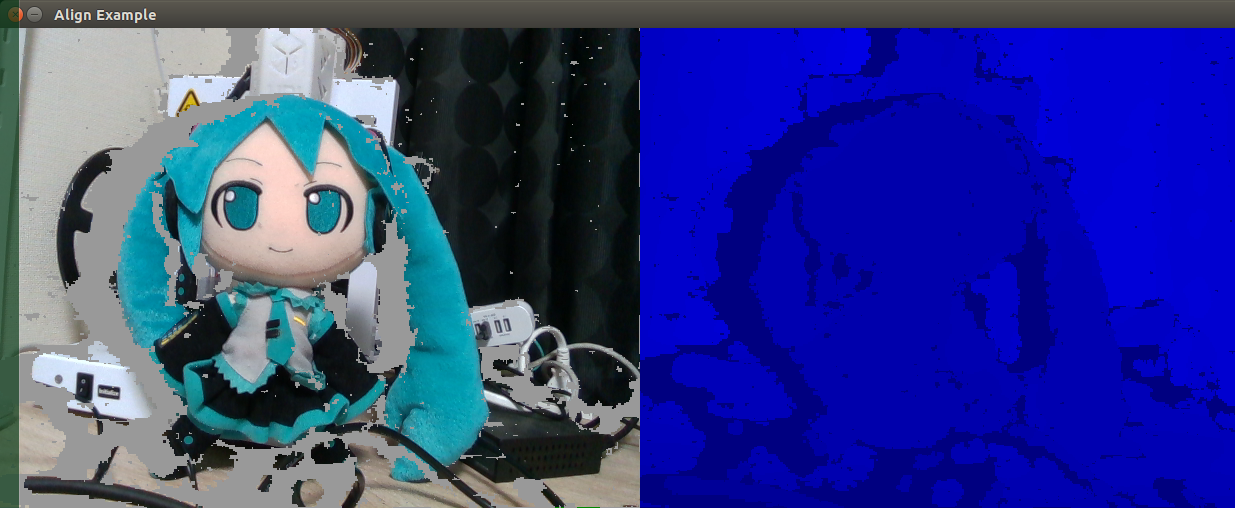
Lassen Sie uns das Beispielprogramm ausführen.
$ cd ~/librealsense/wrappers/python/examples
$ python3 align-depth2color.py
Ich konnte Realsense-Farbbilder und Tiefeninformationen in Python abrufen, wie unten gezeigt.
Wenn Sie sich den Quellcode ansehen, können Sie verstehen, wie Sie ihn bis zu einem gewissen Grad verwenden. Das Dokument ist wie folgt.
Referenz
- http://mirai-tec.hatenablog.com/entry/2018/03/29/000217
- https://github.com/IntelRealSense/librealsense/tree/master/wrappers/python
In Verbindung stehender Artikel
Verwendung von Intel Realsense D435 mit Jetson Nano (ROS-kompatibel)
Recommended Posts