[PYTHON] 100 coups sur le traitement d'image !! (021-030) Je veux faire une pause ...
1.Tout d'abord
Pratiquez ceci pour améliorer les capacités techniques du prétraitement d'image 100 coups pour le traitement d'image !! Je vais le faire avec Colaboratory pour qu'il soit facile de démarrer. Nous travaillerons pour atteindre l'objectif dans deux semaines. Je vais l'expliquer soigneusement. Veuillez poser une question! 001 --010 est le lien à droite Traitement d'image Knock 100 !! (001 --010) Soigneusement et soigneusement 011 --020 est le lien à droite 100 coups sur le traitement d'image !! (011 --020) Début du jeu
2. Préparation
Introduit les bibliothèques, etc. comme suit.
python
#Importer la bibliothèque
from google.colab import drive
import numpy as np
import matplotlib.pyplot as plt
import cv2
from google.colab.patches import cv2_imshow
#Chargement des images
img = cv2.imread('Chemin de l'image/imori.jpg')
img_noise = cv2.imread('Chemin de l'image/imori_noise.jpg')
img_dark = cv2.imread('Chemin de l'image/imori_dark.jpg')
img_gamma = cv2.imread('Chemin de l'image/imori_gamma.jpg')
#Image en échelle de gris
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray_noise = cv2.cvtColor(img_noise, cv2.COLOR_BGR2GRAY)
gray_dark = cv2.cvtColor(img_dark, cv2.COLOR_BGR2GRAY)
#Pour le stockage d'images
OUT_DIR = 'Chemin de destination de sortie/OUTPUT/'
3. Explication
Q.21. Normalisation de l'histogramme
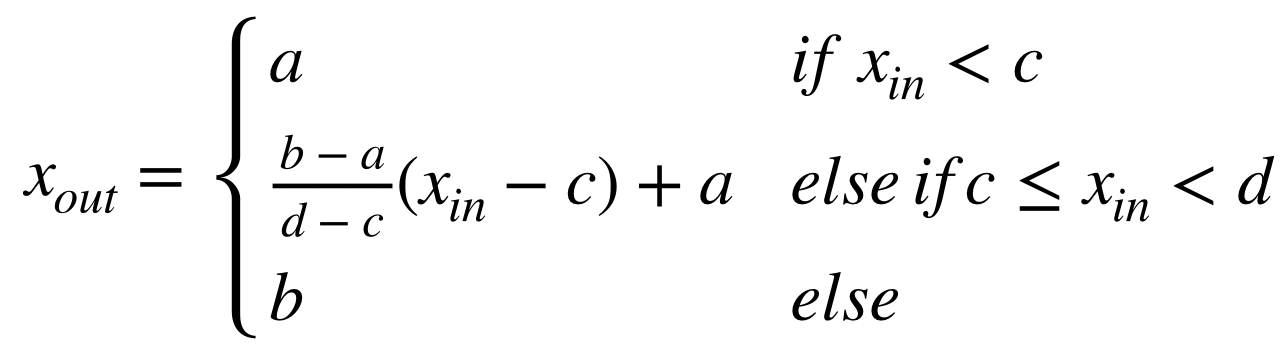
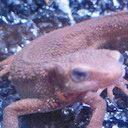
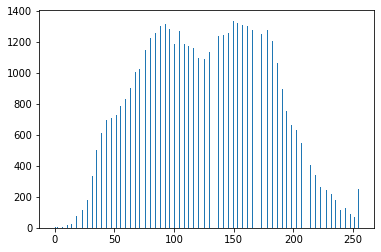
Mettre en œuvre la normalisation de l'histogramme. On peut voir que l'histogramme a un biais. Par exemple, s'il y a beaucoup de pixels proches de 0, l'image sera globalement sombre, et s'il y a beaucoup de pixels proches de 255, l'image sera lumineuse. Les histogrammes polarisés localement sont exprimés comme ayant une plage dynamique étroite. Par conséquent, afin de rendre l'image plus facile à voir pour l'œil humain, il est nécessaire d'effectuer un traitement tel que la normalisation ou l'aplatissement de l'histogramme. Cette normalisation d'histogramme est appelée transformation en échelle de gris et peut être réalisée par l'équation suivante lors de la conversion d'une image avec une valeur de pixel de [c, d] dans la plage de [a, b]. Cette fois, imori_dark.jpg est converti dans la plage de [0, 255] respectivement.
A21
def hist_normalization(img, a=0, b=255):
"""
Normalisation de l'histogramme
params
----------------------------
param1: numpy.image au format ndarray
param2:Valeur minimale de la plage d'histogramme
param3:Valeur maximale de la plage d'histogramme
returns
----------------------------
numpy.image au format ndarray
"""
#histogramme(rgb)Valeur maximale / minimale de
c = img.min() # 60
d = img.max() # 141
#copie
out = img.copy()
#Normalisation
out = (b - a) / (d - c) * (out - c) + a
out[out < a] = a
out[out > b] = b
out = out.astype(np.uint8)
return out
#Obtenez la hauteur, la largeur et la couleur de l'image
H, W, C = img_dark.shape
#Normalisation de l'histogramme
out = hist_normalization(img_dark)
#Afficher un histogramme
plt.hist(out.ravel(), bins=255, rwidth=0.8, range=(0, 255))
plt.savefig("img21.png ")
plt.show()
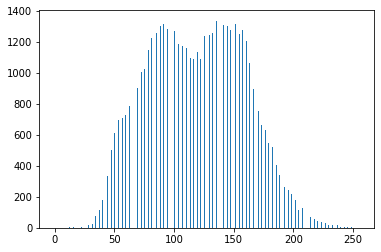 
L'image est également assez nette.

L'image est également assez nette.
Référence: Hystertic Part 2: Aplatir l'histogramme
Q.22 Fonctionnement de l'histogramme
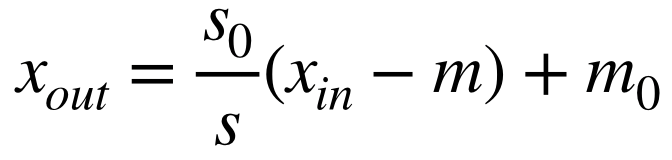
Faites fonctionner la valeur moyenne de l'histogramme sur m0 = 128 et l'écart type sur s0 = 52. Il s'agit d'une opération qui modifie l'histogramme à plat plutôt que de modifier la plage dynamique de l'histogramme. Pour changer l'histogramme de la valeur moyenne m et de l'écart type s en la valeur moyenne m0 et l'écart type s0, effectuez la conversion par l'équation suivante.
A22
def hist_mani(img, m0=128, s0=52):
"""
La valeur moyenne de l'histogramme est m0=128, écart type s0=Exploiter jusqu'à 52 ans
params
--------------------------------------
param1: numpy.image au format ndarray
param2:Valeur moyenne
param3:écart-type
returns
--------------------------------------
numpy.image au format ndarray
"""
#Valeur moyenne
m = np.mean(img)
#écart-type
s = np.std(img)
#Copie de l'image
out = img.copy()
#Calculer selon la formule
out = s0 / s * (out - m) + m0
out[out < 0] = 0
out[out > 255] = 255
out = out.astype(np.uint8)
return out
#Manipuler l'histogramme
out = hist_mani(img_dark)
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans22_1.jpg', out)
#Afficher l'image
cv2_imshow(out)
cv2.waitKey(0)
cv2.destroyAllWindows()
#Afficher un histogramme
plt.hist(out.ravel(), bins=255, rwidth=0.8, range=(0, 255))
plt.savefig("img22_2.png ")
plt.show()
Référence: Hystertic Part 2: Aplatir l'histogramme
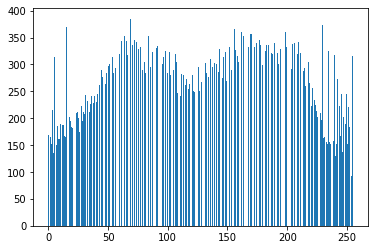
Q.23. Aplatissement de l'histogramme
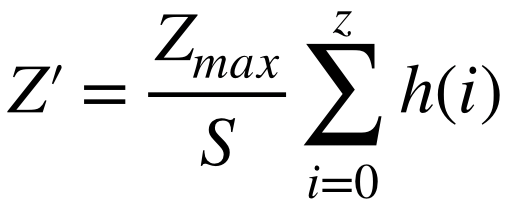
Mettre en œuvre l'aplatissement de l'histogramme. L'aplatissement de l'histogramme est une opération consistant à changer l'histogramme pour qu'il soit plat, et est une opération d'équilibrage des valeurs d'histogramme sans nécessiter la valeur moyenne et l'écart type mentionnés ci-dessus. Ceci est défini par l'équation suivante. Cependant, S ... nombre total de valeurs de pixels, Zmax ... valeur maximale des valeurs de pixels, h (z) ... fréquence de densité z
A23
def hist_equal(img, z_max=255):
"""
Aplatissement du graphite
params
--------------------------------------
param1: numpy.image au format ndarray
param2:Valeur de pixel maximale
returns
--------------------------------------
numpy.image au format ndarray
"""
#Obtenez la hauteur, la largeur et la couleur de l'image
H, W, C = img.shape
#Nombre total de valeurs de pixel(Hauteur de l'image x largeur de l'image x nombre de couleurs)
S = H * W * C * 1. # 49152.0
#Copie de l'image
out = img.copy()
#Fréquence de concentration
sum_h = 0.
#Densité d'image 0~Chaque fréquence jusqu'à 255
for i in range(256):
#Où les concentrations correspondent
ind = np.where(img==i)
#Fréquence de concentration constante
sum_h += len(img[ind])
#Balance des valeurs d'histogramme(Se référer à la formule)
z_prime = z_max / S * sum_h
out[ind] = z_prime
out = out.astype(np.uint8)
return out
#Manipuler l'histogramme
out = hist_equal(img)
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans23_1.jpg', out)
#Afficher l'image
cv2_imshow(out)
cv2.waitKey(0)
cv2.destroyAllWindows()
#Afficher un histogramme
plt.hist(out.ravel(), bins=255, rwidth=0.8, range=(0, 255))
plt.savefig("img23_2.png ")
plt.show()

Référence: Hystertic Part 2: Aplatir l'histogramme
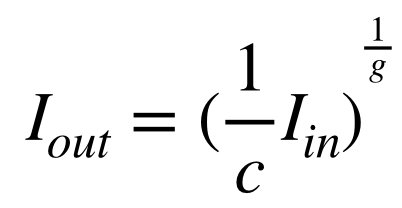
Q.24. Correction gamma
Effectuer une correction gamma (c = 1, g = 2,2) sur imori_gamma.jpg. La correction gamma est une correction lorsque la valeur du pixel est convertie de manière non linéaire via un support tel qu'une caméra. Si l'image est affichée telle quelle sur un affichage ou autre, l'écran s'assombrit.Par conséquent, le but de la correction gamma est d'afficher une image excluant les caractéristiques de l'affichage en augmentant la valeur RVB à l'avance. On dit qu'une conversion non linéaire se produit par l'équation suivante. Cependant, x est normalisé à [0,1]. c ... constante, g ... caractéristique gamma (généralement 2,2)
Par conséquent, la correction gamma est effectuée par l'équation suivante.
A24
def gamma_correction(img, c=1, g=2.2):
"""
Correction gamma: comment régler la luminosité de l'image
params
--------------------------------------
param1: numpy.image au format ndarray
param2:constant
param3:Caractéristiques gamma
returns
--------------------------------------
numpy.image au format ndarray
"""
#Copie de l'image
out = img.copy().astype(np.float)
#Diviser par 255(Convertir en Iin)
out /= 255.
#Formule de correction gamma
out = (1/c * out) ** (1/g)
#Multiplier 255
out *= 255
out = out.astype(np.uint8)
return out
#Correction gamma
out = gamma_correction(img_gamma)
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans24.jpg', out)
#Afficher l'image
cv2_imshow(out)
cv2.waitKey(0)
cv2.destroyAllWindows()

Référence: Essayez Python!
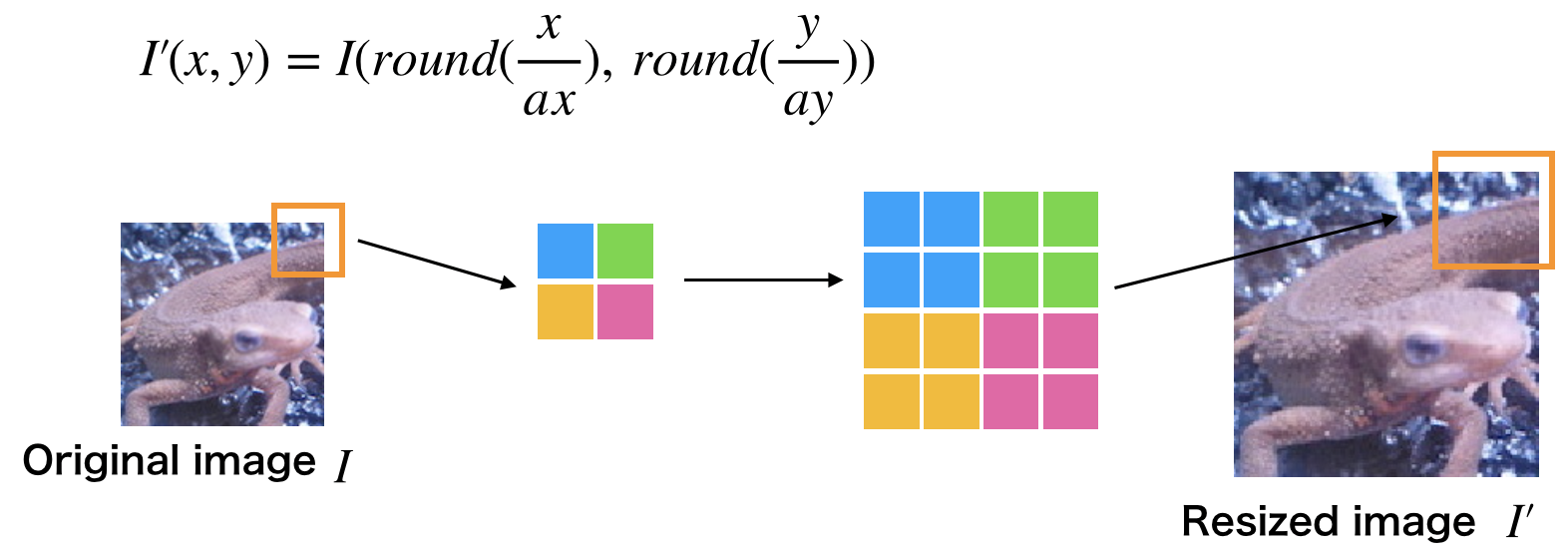
Q.25. Interpolation du voisin le plus proche
Agrandir l'image 1,5 fois par interpolation du plus proche voisin. Le voisin le plus proche est une méthode qui utilise le pixel le plus proche tel quel lors de l'agrandissement de l'image. C'est simple et la vitesse de traitement est rapide, mais la qualité de l'image se détériore considérablement. Interpolé par l'équation suivante. I '... image après agrandissement, I ... image avant agrandissement, un ... taux d'agrandissement, [] ... arrondi
A25
"""
Interpolation du voisin le plus proche
cv2.resize(src, dsize[, interpolation])
image d'entrée src
Taille de l'image après avoir changé dsize
interpolation Méthode d'interpolation(Cv2 pour l'interpolation du plus proche voisin.INTER_NEAREST)
"""
#Interpolation du voisin le plus proche
#Taille de l'image après modification: img.shape>>>(Hauteur, largeur, couleur)
out = cv2.resize(
img, (int(img.shape[1]*1.5), int(img.shape[0]*1.5)), interpolation=cv2.INTER_NEAREST)
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans25.jpg', out)
#Afficher l'image
cv2_imshow(out)
cv2.waitKey(0)
cv2.destroyAllWindows()

Référence: [[Python / OpenCV] Agrandissement / réduction de l'image (méthode d'interpolation du plus proche voisin, méthode d'interpolation bilinéaire, méthode d'interpolation bicubique)](https://algorithm.joho.info/programming/python/opencv-resize-nearest- interpolation-py /)
Q.26. Interpolation bi-linéaire
Agrandissez l'image 1,5 fois avec l'interpolation bi-linéaire. L'interpolation bi-linéaire est une méthode pour compléter les quatre pixels environnants en les pondérant en fonction de la distance. Plus la quantité de calcul est élevée, plus le temps de traitement est long, mais la détérioration de la qualité de l'image peut être supprimée.
A26
"""
Méthode d'interpolation bilinéaire (Bi-interpolation linéaire) est une méthode d'interpolation qui utilise les quatre pixels environnants.
cv2.resize(src, dsize[, interpolation])
image d'entrée src
Taille de l'image après avoir changé dsize
interpolation Méthode d'interpolation(Cv2 pour l'interpolation bilinéaire.INTER_LINEAR)
"""
#Méthode d'interpolation bilinéaire
#Taille de l'image après modification: img.shape>>>(Hauteur, largeur, couleur)
out = cv2.resize(
img, (int(img.shape[1]*1.5), int(img.shape[0]*1.5)), interpolation=cv2.INTER_LINEAR)
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans26.jpg', out)
#Afficher l'image
cv2_imshow(out)
cv2.waitKey(0)
cv2.destroyAllWindows()

Référence: [[Python / OpenCV] Agrandissement / réduction de l'image (méthode d'interpolation du plus proche voisin, méthode d'interpolation bilinéaire, méthode d'interpolation bicubique)](https://algorithm.joho.info/programming/python/opencv-resize-nearest- interpolation-py /)
Q.27. Interpolation bi-cubique
Agrandissez l'image 1,5 fois avec une interpolation bi-cubique. L'interpolation bi-cubique est une extension de l'interpolation bi-linéaire, et l'interpolation est effectuée à partir des 16 pixels environnants.
A27
"""
La méthode d'interpolation bicubique utilise les valeurs de pixel de 16 pixels environnants.
cv2.resize(src, dsize[, interpolation])
image d'entrée src
Taille de l'image après avoir changé dsize
interpolation Méthode d'interpolation(Cv2 pour l'interpolation bicubique.INTER_CUBIC)
"""
#Interpolation bicubique
#Taille de l'image après modification: img.shape>>>(Hauteur, largeur, couleur)
out = cv2.resize(
img, (int(img.shape[1]*1.5), int(img.shape[0]*1.5)), interpolation=cv2.INTER_CUBIC)
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans27.jpg', out)
#Afficher l'image
cv2_imshow(out)
cv2.waitKey(0)
cv2.destroyAllWindows()

Référence: [[Python / OpenCV] Agrandissement / réduction de l'image (méthode d'interpolation du plus proche voisin, méthode d'interpolation bilinéaire, méthode d'interpolation bicubique)](https://algorithm.joho.info/programming/python/opencv-resize-nearest- interpolation-py /)
Q.28. Conversion d'affine (mouvement parallèle)
Utilisez la transformation affine pour déplacer l'image en parallèle de +30 dans la direction x et de -30 dans la direction y. La transformation affine est une opération qui transforme une image à l'aide d'une matrice 3x3.
A28
"""
Conversion d'affine
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
Image d'origine (tableau NumPy ndarray) comme premier argument
Matrice de conversion 2 x 3 (tableau NumPy ndarray) comme deuxième argument,
Spécifiez la taille (taple) de l'image de sortie dans le troisième argument.
"""
#Obtenez la hauteur, la largeur et la couleur de l'image
H, W, C = img.shape
#Mouvement parallèle[[1,0,Quantité de mouvement dans le sens latéral],[0,1,Quantité de mouvement dans le sens vertical]]Matrice 2x3
M = np.float64([[1, 0, 30], [0,1,-30]])
#Conversion d'affine
out = cv2.warpAffine(img, M, (W, H))
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans28.jpg', out)
#Afficher l'image
cv2_imshow(out)
cv2.waitKey(0)
cv2.destroyAllWindows()

Référence: [Python / OpenCV] Faire pivoter l'image avec conversion affine
Q.29. Conversion d'affine (agrandissement / réduction)
Utilisez la transformation affine pour (1) redimensionner 1,3 fois dans la direction x et 0,8 fois dans la direction y. De plus, en plus des conditions (2) et (1), réalisez un mouvement parallèle de +30 dans la direction x et de -30 dans la direction y en même temps.
A29
def affine_expand(img, ratio_x, ratio_y):
"""
Agrandir avec conversion affine
params
-------------------------------
param1: numpy.image au format ndarray
param2:Rapport de direction X
param3:Rapport dans la direction y
returns
-------------------------------
numpy.image au format ndarray
"""
#Hauteur et largeur de l'image
H, W = img.shape[:2]
#coordonnées xy np.type float32
src = np.array([[0.0, 0.0],[0.0, 1.0],[1.0, 0.0]], np.float32)
# x,y Multipliez chaque rapport
dest = src.copy()
dest[:,0] *= ratio_x
dest[:,1] *= ratio_y
"""
Générer une matrice de transformation pour une transformation affine: cv2.getAffineTransform(src, dest)
src:Coordonnées de 3 points avant conversion
dest:Spécifiez les coordonnées des trois points après la conversion avec le tableau NumPy ndarray
"""
affine = cv2.getAffineTransform(src, dest)
"""
Conversion d'affine
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
Image d'origine (tableau NumPy ndarray) comme premier argument
Matrice de conversion 2 x 3 (tableau NumPy ndarray) comme deuxième argument,
Spécifiez la taille (taple) de l'image de sortie dans le troisième argument.
INTER_LANCZOS4 - Interpolation de Lanczos utilisant la zone de voisinage de 8 × 8
"""
return cv2.warpAffine(img, affine, (int(W*ratio_x), int(H*ratio_y)), cv2.INTER_LANCZOS4) #La méthode d'interpolation peut également être spécifiée
#Agrandir avec conversion affine
out = affine_expand(img, 1.3, 0.8)
#Mouvement parallèle[[1,0,Quantité de mouvement dans le sens latéral],[0,1,Quantité de mouvement dans le sens vertical]]Matrice 2x3
H, W = out.shape[:2]
M = np.float64([[1, 0, 30], [0,1,-30]])
out2 = cv2.warpAffine(out, M, (W, H))
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans29_1.jpg', out)
cv2.imwrite(OUT_DIR + 'ans29_2.jpg', out2)
#Afficher l'image
cv2_imshow(out)
cv2_imshow(out2)
cv2.waitKey(0)
cv2.destroyAllWindows()


Référence: Comprendre complètement la conversion Affin
Q.30. Conversion d'affine (rotation)
(1) Faites pivoter 30 degrés dans le sens antihoraire en utilisant la transformation affine. (2) Créez une image de sorte qu'il y ait le moins de zones noires possible en fixant les coordonnées centrales avec une image tournée de 30 degrés dans le sens antihoraire à l'aide de la transformation Affin. (Cependant, si vous effectuez une simple conversion affine, l'image sera coupée, vous devez donc être créatif.)
A30
def affin_rotate(img, x, y, theta, scale):
"""
Rotation avec conversion affine
params
-------------------------------
param1: numpy.image au format ndarray
param2:Coordonnée X de l'axe de rotation
param3:Coordonnée Y de l'axe de rotation
param4:Angle de rotation
param5:Angle de rotation / grossissement
returns
-------------------------------
numpy.image au format ndarray
"""
"""
Transformation d'affine représentant une rotation bidimensionnelle
cv2.getRotationMatrix2D(center, angle, scale)
center:Coordonnées qui sont à l'origine de la rotation
angle:Angle de rotation (degré degré, pas radian)
scale:Rapport agrandissement / réduction.
"""
#Calcul de la matrice de conversion de rotation
R = cv2.getRotationMatrix2D((x, y), theta, scale)
"""
Conversion d'affine
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
Image d'origine (tableau NumPy ndarray) comme premier argument
Matrice de conversion 2 x 3 (tableau NumPy ndarray) comme deuxième argument,
Spécifiez la taille (taple) de l'image de sortie dans le troisième argument.
cv2.INTER_CUBIC:Bicubique
"""
#Conversion d'affine
dst = cv2.warpAffine(img, R, gray.shape,
flags=cv2.INTER_CUBIC)
return dst
#Coordonnées du centre de l'image
oy, ox = int(img.shape[0]/2), int(img.shape[1]/2)
#Rotation de 30 degrés dans le sens antihoraire
out1 = affin_rotate(img, 0, 0, 30, 1)
#Coordonnées centrales fixes avec image tournée de 30 degrés dans le sens antihoraire
out2 = affin_rotate(img, ox, oy, 30, 1)
#Sauvegarder le résultat
cv2.imwrite(OUT_DIR + 'ans30_1.jpg', out1)
cv2.imwrite(OUT_DIR + 'ans31_2.jpg', out2)
#Afficher l'image
cv2_imshow(out1)
cv2_imshow(out2)
cv2.waitKey(0)
cv2.destroyAllWindows()


Référence: Conversion géométrique avec Python, OpenCV (conversion affine, conversion de projection, etc.) Référence: [Python / OpenCV] Faire pivoter l'image avec transformation affine
Impressions
On a l'impression que le niveau augmente progressivement. Essayez d'implémenter autant que possible OpenCV.
Recommended Posts