[PYTHON] [Reinforcement learning] DeepMind Experience Replay library Reverb usage survey [Client edition]
Japanese reprint of blog article posted in English
1.First of all
Continuing from Last time, about Reberb of DeepMind's Experience Replay library. This time, while reading the source code, I investigated the part not written in the README on the client side that instructs the data input / output operation.
2. Client and TFClient
Reverb uses a server-client model, but there are two client-side classes, reverb.Client and reverb.TFClient.
It is said that Client is for the early stages of development, and TFClient is used in the actual learning program. The big difference is that TFClient, as the name implies, is intended to be used in the computational graphs of TensorFlow.
One of the motivations for writing this organized article was that the APIs and usage of both were inconsistent and complicated.
The following article assumes that the server and client programs have been initialized as follows:
import numpy as np
import tensorflow as tf
import reverb
table_name = "ReplayBuffer"
alpha = 0.8
buffer_size = 1000
batch_size = 32
server = reverb.Server(tables=[reverb.Table(name=table_name,
sampler=reverb.selectors.Prioritized(alpha),
remover=reverb.selectors.Fifo(),
max_size=buffer_size,
rate_limiter=reverb.rate_limiters.MinSize(1))])
client = reverb.Client(f"localhost:{server.port}")
tf_client = reverb.TFClient(f"localhost:{server.port}")
obs = np.zeros((4,))
act = np.ones((1,))
rew = np.ones((1,))
next_obs = np.zeros_like(obs)
done = np.zeros((1,))
priority = 1.0
dtypes = [tf.float64,tf.float64,tf.float64,tf.float64,tf.float64]
shapes = [4,1,1,4,1]
3. Preservation of transition or trajectory
3.1 Client.insert
client.insert([obs,act,rew,next_obs,done],priorities={table_name: priority})
The priorities argument is dict because the same data can be registered in multiple tables (replay buffers) at the same time with different priorities. (I didn't know there was such a need)
You need to specify priority, even for regular non-Prioritized replay buffers.
Client.insert sends data to the server each time it is called
3.2 Client.writer
with client.writer(max_sequence_length=3) as writer:
writer.append([obs,act,rew,next_obs,done])
writer.create_item(table_name,num_timesteps=1,priority=priority)
writer.append([obs,act,rew,next_obs,done])
writer.append([obs,act,rew,next_obs,done])
writer.append([obs,act,rew,next_obs,done])
writer.create_item(table_name,num_timesteps=3,priority=priority) #Register 3 steps as 1 item.
#Send to server when exiting with block
By using reverb.Writer returned by the Client.writer method as a context manager,
You can set the contents to be saved more flexibly.
For example, the first half of the sample code above saves the same content as 3.1, but the second half saves the three steps together as one item. In other words, when sampling, you can sample all three as one. For example, it can be assumed that it is used when you want to sample each episode.
Data is sent to the server when Writer.flush () or Writer.close () is called (it is also called automatically when exiting the with block).
3.3 TFClient.insert
tf_client.inser([tf.constant(obs),
tf.constant(act),
tf.constant(rew),
tf.constant(next_obs),
tf.constant(done)],
tablea=tf.constant([table_name]),
priorities=tf.constant([priority],dtype=tf.float64))
The tables argument is a rank 1 tf.Tensor of str, and the priorities is a rank 1 tf.Tensor of float64 (which would otherwise be a float32). Both shapes must match.
It is probably necessary to keep the tf.Tensor of each data at rank 1 or higher for later sampling.
3.4 Summary
| Send to server | Multiple steps into one item | Use in TF calculation graph | data | |
|---|---|---|---|---|
Client.insert |
Every time | X | X | anything is fine |
Client.writer |
Writer.close(), Writer.flush() (IncludingwithWhen leaving) |
O | X | anything is fine |
TFClient.insert |
Every time | X | O | tf.Tensor |
4. Reading a transition or trajectory
Neither method corresponds to the β parameter of weight correction in Prioritized Experience Replay. (It doesn't calculate the weight of priority sampling in the first place)
4.1 Client.sample
client.sample(table_name,num_samples=batch_size)
The return value is the generator of reverb.replay_sample.ReplaySample. ReplaySample is a named Tuple and has ʻinfo and data. Data contains the saved data, and ʻinfo contains information such as key and priority.
4.2 TFClient.sample
tf_client.sample(tf.constant([table_name]),data_dtypes=dtypes)
Unfortunately, this method does not support batch sampling. The return value will be ReplaySample.
4.3 TFClient.dataset
tf_client.dataset(tf.constant([table_name]),dtypes=dtypes,shapes=shapes)
It adopts a method that is completely different from other methods, and it seems that it is mainly intended to adopt this method in large-scale production learning.
The return value of this function is reverb.ReplayDataset, which inherits tf.data.Dataset. This ReplayDataset can pull out ReplaySample like generator, and it will automatically fetch data from the server at the right time. In other words, instead of sample every time, once you set ReplayDataset, it will continue to eject the automatically saved data.
Since shapes raises an error when 0 is specified as an element, it seems necessary to save the data at rank 1 or higher.
Other parameters for performance adjustment are detailed to write here, so check the Comment in the source code. I want you to.
4.4 Summary
| Batch output | Return type | Type specification | Designation of shape | |
|---|---|---|---|---|
Client.sample |
O | replay_sample.ReplaySampleofgenerator |
Unnecessary | Unnecessary |
TFClient.sample |
X | replay_sample.ReplaySample |
necessary | Unnecessary |
TFClient.dataset |
O (Automatically implemented internally) | ReplayDataset |
necessary | necessary |
5. Update of priority
Unlike other replay buffer implementations, the ID that specifies the element is not a serial number starting with 0, but a seemingly random hash. It can be accessed with ReplaySample.info.key.
(Since it is difficult to write, I will omit some of the sample code. I'm sorry.)
5.1 Client.mutate_priorities
client.mutate_priorities(table_name,updates={key:new_priority},deletes=[...])
This can be deleted as well as updated.
5.2 TFClient.update_priorities
tf_client.update_priorities(tf.constant([table_name]),
keys=tf.constant([...]),
priorities=tf.constant([...],dtype=tf.float64))
6. Performance comparison
Since it's a big deal, I also benchmarked my work cpprb.
** Note: Reinforcement learning is not determined solely by the speed of the replay buffer, as there are other heavy processes such as deep learning learning and environment updates. (On the other hand, depending on the implementation and conditions of the replay buffer, it seems that the processing time of the replay buffer and the processing time of deep learning may be about the same.) **
Benchmark was executed in the environment by the following Dockerfile.
Dockerfile
FROM python:3.7
RUN apt update \
&& apt install -y --no-install-recommends libopenmpi-dev zlib1g-dev \
&& apt clean \
&& rm -rf /var/lib/apt/lists/* \
&& pip install tf-nightly==2.3.0.dev20200604 dm-reverb-nightly perfplot
# Reverb requires development version TensorFlow
CMD ["bash"]
(Since it is implemented on the CI of the repository of cpprb, cpprb is also installed additionally. It is almost synonymous with pip install cpprb)
Then, I ran the following benchmark script and drew a graph of execution time.
benchmark.py
import gc
import itertools
import numpy as np
import perfplot
import tensorflow as tf
# DeepMind/Reverb: https://github.com/deepmind/reverb
import reverb
from cpprb import (ReplayBuffer as RB,
PrioritizedReplayBuffer as PRB)
# Configulation
buffer_size = 2**12
obs_shape = 15
act_shape = 3
alpha = 0.4
beta = 0.4
env_dict = {"obs": {"shape": obs_shape},
"act": {"shape": act_shape},
"next_obs": {"shape": obs_shape},
"rew": {},
"done": {}}
# Initialize Replay Buffer
rb = RB(buffer_size,env_dict)
# Initialize Prioritized Replay Buffer
prb = PRB(buffer_size,env_dict,alpha=alpha)
# Initalize Reverb Server
server = reverb.Server(tables =[
reverb.Table(name='ReplayBuffer',
sampler=reverb.selectors.Uniform(),
remover=reverb.selectors.Fifo(),
max_size=buffer_size,
rate_limiter=reverb.rate_limiters.MinSize(1)),
reverb.Table(name='PrioritizedReplayBuffer',
sampler=reverb.selectors.Prioritized(alpha),
remover=reverb.selectors.Fifo(),
max_size=buffer_size,
rate_limiter=reverb.rate_limiters.MinSize(1))
])
client = reverb.Client(f"localhost:{server.port}")
tf_client = reverb.TFClient(f"localhost:{server.port}")
# Helper Function
def env(n):
e = {"obs": np.ones((n,obs_shape)),
"act": np.zeros((n,act_shape)),
"next_obs": np.ones((n,obs_shape)),
"rew": np.zeros(n),
"done": np.zeros(n)}
return e
def add_client(_rb,table):
""" Add for Reverb Client
"""
def add(e):
n = e["obs"].shape[0]
with _rb.writer(max_sequence_length=1) as _w:
for i in range(n):
_w.append([e["obs"][i],
e["act"][i],
e["rew"][i],
e["next_obs"][i],
e["done"][i]])
_w.create_item(table,1,1.0)
return add
def add_client_insert(_rb,table):
""" Add for Reverb Client
"""
def add(e):
n = e["obs"].shape[0]
for i in range(n):
_rb.insert([e["obs"][i],
e["act"][i],
e["rew"][i],
e["next_obs"][i],
e["done"][i]],priorities={table: 1.0})
return add
def add_tf_client(_rb,table):
""" Add for Reverb TFClient
"""
def add(e):
n = e["obs"].shape[0]
for i in range(n):
_rb.insert([tf.constant(e["obs"][i]),
tf.constant(e["act"][i]),
tf.constant(e["rew"][i]),
tf.constant(e["next_obs"][i]),
tf.constant(e["done"])],
tf.constant([table]),
tf.constant([1.0],dtype=tf.float64))
return add
def sample_client(_rb,table):
""" Sample from Reverb Client
"""
def sample(n):
return [i for i in _rb.sample(table,num_samples=n)]
return sample
def sample_tf_client(_rb,table):
""" Sample from Reverb TFClient
"""
def sample(n):
return [_rb.sample(table,
[tf.float64,tf.float64,tf.float64,tf.float64,tf.float64])
for _ in range(n)]
return sample
def sample_tf_client_dataset(_rb,table):
""" Sample from Reverb TFClient using dataset
"""
def sample(n):
dataset=_rb.dataset(table,
[tf.float64,tf.float64,tf.float64,tf.float64,tf.float64],
[4,1,1,4,1])
return itertools.islice(dataset,n)
return sample
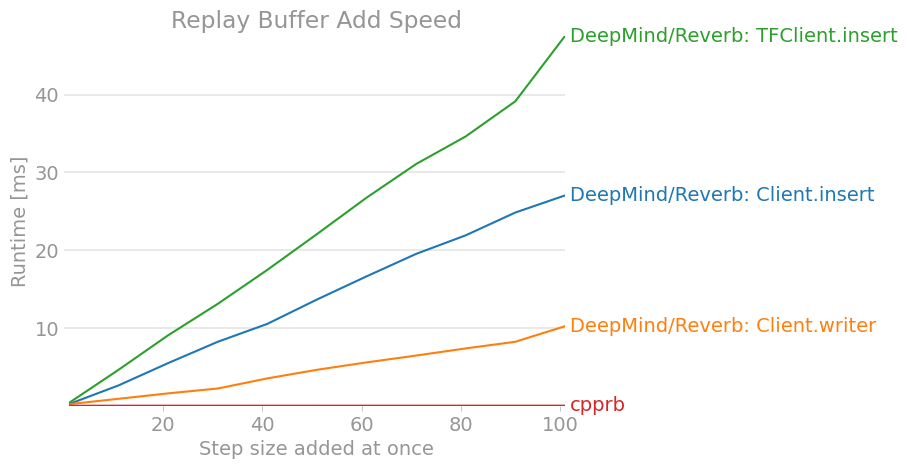
# ReplayBuffer.add
perfplot.save(filename="ReplayBuffer_add2.png ",
setup = env,
time_unit="ms",
kernels = [add_client_insert(client,"ReplayBuffer"),
add_client(client,"ReplayBuffer"),
add_tf_client(tf_client,"ReplayBuffer"),
lambda e: rb.add(**e)],
labels = ["DeepMind/Reverb: Client.insert",
"DeepMind/Reverb: Client.writer",
"DeepMind/Reverb: TFClient.insert",
"cpprb"],
n_range = [n for n in range(1,102,10)],
xlabel = "Step size added at once",
title = "Replay Buffer Add Speed",
logx = False,
logy = False,
equality_check = None)
# Fill Buffers
for _ in range(buffer_size):
o = np.random.rand(obs_shape) # [0,1)
a = np.random.rand(act_shape)
r = np.random.rand(1)
d = np.random.randint(2) # [0,2) == 0 or 1
client.insert([o,a,r,o,d],priorities={"ReplayBuffer": 1.0})
rb.add(obs=o,act=a,rew=r,next_obs=o,done=d)
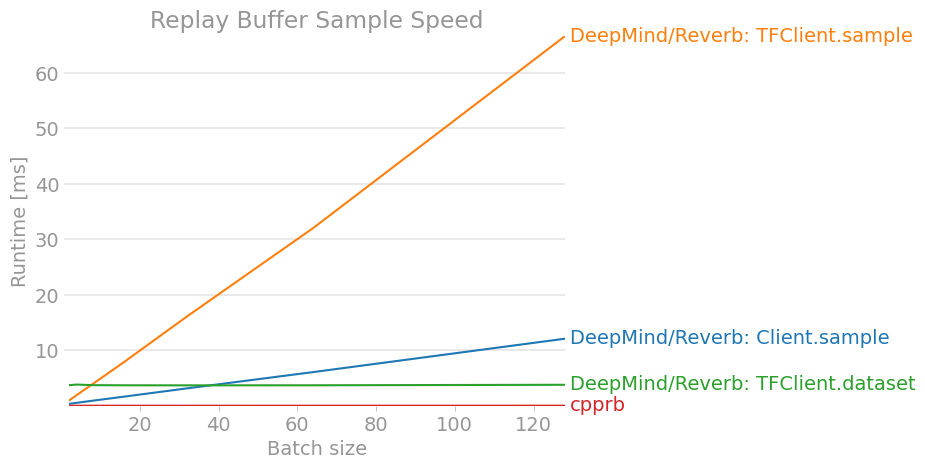
# ReplayBuffer.sample
perfplot.save(filename="ReplayBuffer_sample2.png ",
setup = lambda n: n,
time_unit="ms",
kernels = [sample_client(client,"ReplayBuffer"),
sample_tf_client(tf_client,"ReplayBuffer"),
sample_tf_client_dataset(tf_client,"ReplayBuffer"),
rb.sample],
labels = ["DeepMind/Reverb: Client.sample",
"DeepMind/Reverb: TFClient.sample",
"DeepMind/Reverb: TFClient.dataset",
"cpprb"],
n_range = [2**n for n in range(1,8)],
xlabel = "Batch size",
title = "Replay Buffer Sample Speed",
logx = False,
logy = False,
equality_check=None)
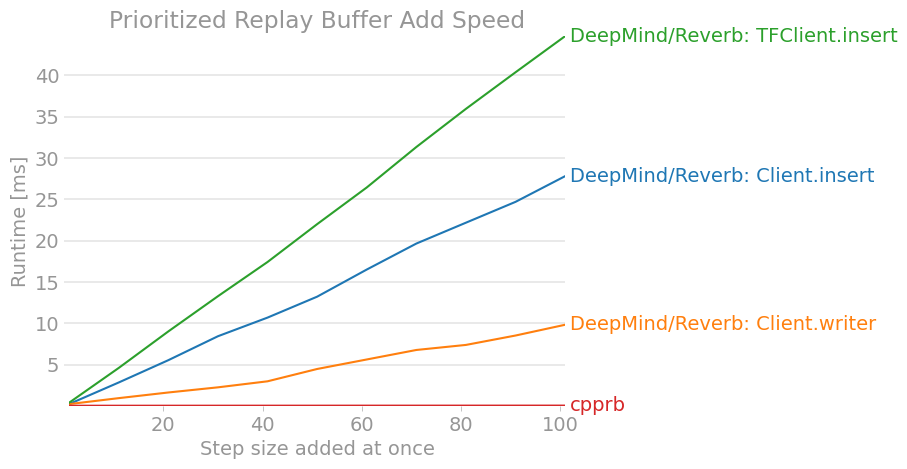
# PrioritizedReplayBuffer.add
perfplot.save(filename="PrioritizedReplayBuffer_add2.png ",
time_unit="ms",
setup = env,
kernels = [add_client_insert(client,"PrioritizedReplayBuffer"),
add_client(client,"PrioritizedReplayBuffer"),
add_tf_client(tf_client,"PrioritizedReplayBuffer"),
lambda e: prb.add(**e)],
labels = ["DeepMind/Reverb: Client.insert",
"DeepMind/Reverb: Client.writer",
"DeepMind/Reverb: TFClient.insert",
"cpprb"],
n_range = [n for n in range(1,102,10)],
xlabel = "Step size added at once",
title = "Prioritized Replay Buffer Add Speed",
logx = False,
logy = False,
equality_check=None)
# Fill Buffers
for _ in range(buffer_size):
o = np.random.rand(obs_shape) # [0,1)
a = np.random.rand(act_shape)
r = np.random.rand(1)
d = np.random.randint(2) # [0,2) == 0 or 1
p = np.random.rand(1)
client.insert([o,a,r,o,d],priorities={"PrioritizedReplayBuffer": p})
prb.add(obs=o,act=a,rew=r,next_obs=o,done=d,priority=p)
perfplot.save(filename="PrioritizedReplayBuffer_sample2.png ",
time_unit="ms",
setup = lambda n: n,
kernels = [sample_client(client,"PrioritizedReplayBuffer"),
sample_tf_client(tf_client,"PrioritizedReplayBuffer"),
sample_tf_client_dataset(tf_client,"PrioritizedReplayBuffer"),
lambda n: prb.sample(n,beta=beta)],
labels = ["DeepMind/Reverb: Client.sample",
"DeepMind/Reverb: TFClient.sample",
"DeepMind/Reverb: TFClient.dataset",
"cpprb"],
n_range = [2**n for n in range(1,9)],
xlabel = "Batch size",
title = "Prioritized Replay Buffer Sample Speed",
logx=False,
logy=False,
equality_check=None)
The result is as follows. (The results may be out of date, so you can check the latest version at cpprb project site.)
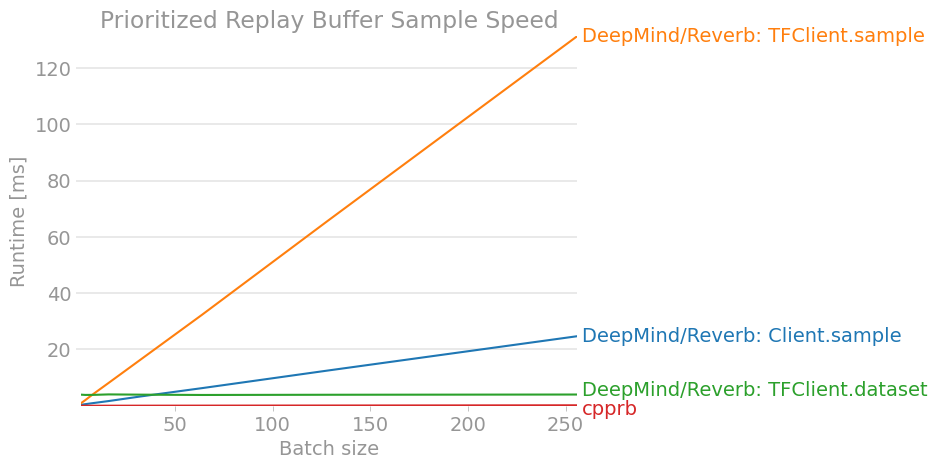
7. Conclusion
We investigated and organized how to use the Reverb client of the DeepMind Experience Replay framework. Compared to other replay buffer implementations such as OpenAI / Baselines, I found it difficult to understand because there are many differences in API and usage. (I hope it will be a little easier to understand by the time the stable version is released.)
At the very least, it wouldn't seem to be superior in terms of performance unless large-scale distributed learning was performed and all reinforcement learning was completed within the TensorFlow calculation graph.
Of course, large-scale distributed learning and reinforcement learning in computational graphs have the potential to significantly improve performance, so I think we need to continue to consider them.
Recommended Posts