[PYTHON] OpenCV AI Kit (OAK-D) I tried @ windows10
This is the first post.
This is a report of the AI stereo camera that was cloud-founded by the kickstarter OpenCV AI Kit in August 2020.
Until acquisition
In August 2020, I pledged with kickstarter OpenCV AI Kit for $ 149 + 20 (shipping cost). After the establishment, the additional shipping fee is $ 16 and the tax is $ 14.9, and the final price is $ 199.9. Now it seems that you can buy it at https://store.opencv.ai/.
Composition
As shown in the photo. The power supply is 5.0V-3.0A and has connectors for all over the world. At least at the demo level of the tutorial, it runs on unpowered USB bus power.

Installation work
Basically, just follow the tutorial on the site written in URL of the included card. Below is the case for windows10. python3.9 installed.
--Open PowerShell in administrator mode
--Set execution policy
Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager]::SecurityProtocol = [System.Net.ServicePointManager]::SecurityProtocol -bor 3072; iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))
--Install all at once with choco
choco install cmake git python pycharm-community -y
--Pip depthai
python -m pip install depthai
depthAI demo preparation
--clone depthai to a suitable folder
git clone https://github.com/luxonis/depthai.git
cd depthai
--Execute the script for checking the required libraries * Officially recommended to execute in a virtual environment
python install_requirements.py
DepthAI demo run result
--Execute demo script (camera connection required)
python depthai_demo.py
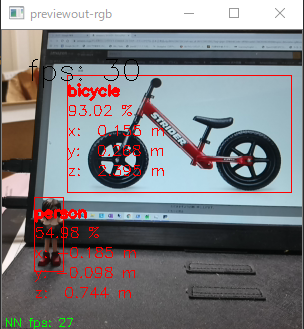
The distance to the object detected by the mobilenet 20class classification is displayed. Is Z the depth direction?
The image was taken from about 50 cm in front. The distance to the doll (person) is ok, but the distance to the bike on the screen is inaccurate. Maybe it's too close to get parallax.
DEPTH image
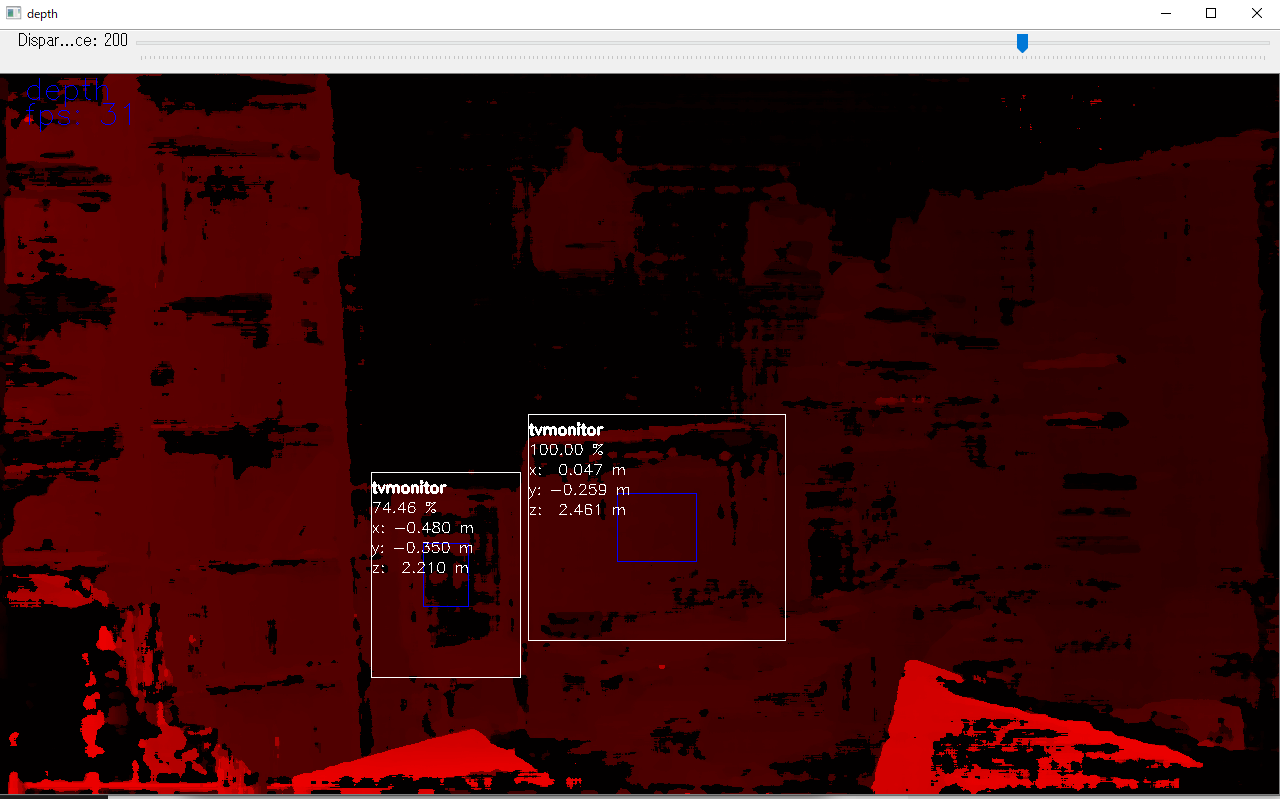
You can also output a depth image by adding an option to the previous depthai_demo.py.
python .\depthai_demo.py -s metaout depth_raw -bb
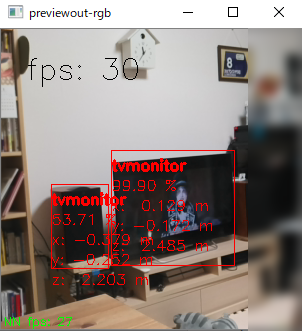
--Visible image with the same angle of view
The parallax looks like you often see it in a general stereo, and it seems to be fairly clear.
The accuracy of object detection is rather delicate as if the speaker was mistaken for a TV monitor. There is also a Tutorial for using other models of OpenVINO, so I think it will be easier to replace it.
Summary
I could easily check the movement.
There are various possible causes of distance measurement error, such as passive stereo characteristics, algorithmic ones, and insufficient calibration. In the future, while proceeding with the tutorial, we will read the contents of the sample code so that we can bring out the performance.
References
https://docs.luxonis.com/en/latest/pages/api/ https://docs.luxonis.com/en/latest/pages/tutorials/pretrained_openvino/
Recommended Posts