Miyashita Ich löse Übungen in analytischer Mechanik. Wenn Sie Fehler finden, lassen Sie es uns bitte wissen.
Kapitel 1
 Für Pendelbewegungen der Länge $ l $ ist der Winkel $ \ phi $ die einzige inhaltliche Variable. Es ist bequemer, die Position des Versprechens in Polarkoordinaten anstelle von kartesischen Koordinaten auszudrücken. Durch die gute Verwendung von Variablen, die auf diese Weise Bindungsbedingungen berücksichtigen, ist es möglich, wesentliche Bewegungsvariablen zu handhaben.
Für Pendelbewegungen der Länge $ l $ ist der Winkel $ \ phi $ die einzige inhaltliche Variable. Es ist bequemer, die Position des Versprechens in Polarkoordinaten anstelle von kartesischen Koordinaten auszudrücken. Durch die gute Verwendung von Variablen, die auf diese Weise Bindungsbedingungen berücksichtigen, ist es möglich, wesentliche Bewegungsvariablen zu handhaben.
Finden Sie den Lagrange des Pendels (Abb. 1.3) in orthogonalen Koordinaten (x, y). (Beispiel in Kapitel 2, S. 11)
Die kinetische Energie beträgt $ T = 1 / 2m \ dot {x} ^ 2 + 1 / 2m \ dot {y} ^ 2 $, und die potentielle Energie beträgt $ U = mgy $
Deshalb Lagrange
$L=\frac{m}{2}(\dot{x}^2+\dot{y}^2)-mgy$
Auch hier sind die Bindungsbedingungen
x^2+y^2=l^2
Es gibt.
Finden Sie den Lagrange des Pendels (Abb. 1.3) in Polarkoordinaten (l, Φ). (Beispiel in Kapitel 2, S. 12)
x=l\sin \phi
y=-l\cos \phi
Als
\dot{x}=\dot{l}\sin \phi + l\dot{\phi}\cos \phi
\dot{y}=-\dot{l}\cos \phi + l\dot{\phi}\sin \phi
Deshalb
\frac{m}{2}(\dot{x}+\dot{y})^2=(\dot{l}\sin \phi + l\dot{\phi\}cos \phi)^2+(\dot{l}\sin \phi + l\dot{\phi}\cos \phi)^2=\frac{m}{2}(\dot{l}^2+l^2 \dot{\phi}^2)
U=mgl\cos \phi
Weil $ l $ konstant ist
L=\frac{m}{2}(l^2 \dot{\phi}^2)+mgl\cos \phi
Bindungsbedingungen können in Polarkoordinaten gut gehandhabt werden.
Bewegungsgleichung
Lagranges Bewegungsgleichung
\frac{d}{dt}\frac{\partial L}{\partial \phi}=ml^2\ddot{\phi}
\frac{\partial L}{\partial \phi}=-mgl\sin \phi
\therefore
\ddot{\phi}=-\frac{g}{l}\sin \phi
Bewegungsgleichung lösen
Finden Sie die Lösung der winzigen Vibration in der Nähe von Φ = 0.
Wenn Taylor zum ersten expandiert
\dot{\phi}=\frac{p_φ}{ml^2}
\dot{p_\phi}=mgl\phi
Wird sein. Deshalb
\ddot{\phi}=-\frac{g}{l}\phi
Die allgemeine Lösung dieser Gleichung lautet
\phi=A\cos(\sqrt{\frac{g}{l}}t+B)
Wenn $ \ phi = \ phi_0 << 1, ist \ \ dot {\ phi} = 0 $
A=\phi_0, \ \dot{\phi}=A\frac{g}{l}\sin(B)=0 \therefore B=0
Deshalb,
\phi=\phi_0 \cos(\sqrt{\frac{g}{l}}t)
Finden Sie die Schwingungslösung mit Φ0 als Anfangswert.
\ddot{\phi_1}=-\frac{g}{l}\sin(\phi_1)
Hier $ \ phi_1 = \ phi + \ phi_0 $
Die Lösung dieser Gleichung kann leicht durch numerische Analyse von Python erhalten werden.
Es ist notwendig, die Differentialgleichung zweiter Ordnung in die Differentialgleichung erster Ordnung zu ändern.
\dot{\phi}=\omega
\dot{\omega}=-\frac{g}{l}\sin \phi
Python verwendet scipy.integrate.solve_ivp. Dies ergibt das Integral der gewöhnlichen Differentialgleichung mit dem Anfangswert.
scipy.integrate.solve_ivp(fun, t_span, y0, method='RK45', t_eval=None, dense_output=False, events=None, vectorized=False, args=None, **options)
Im
Spaß: Funktion
t_span: Integrationsbereich
y0: Anfangswert
Methode: 'RK45 explizite Runge-Tack-Methode
t_eval: Zeit zum Speichern des Berechnungsergebnisses
Animation erstellen
Mikrovibration
%matplotlib inline
from numpy import sin, cos
from scipy.integrate import solve_ivp
from matplotlib.animation import FuncAnimation
import matplotlib.pyplot as plt
import numpy as np
g = 9.8 #Schwerkraftbeschleunigung[m/s^2]
l = 1.0 #Pendellänge[m]
t_span = [0,20] #Beobachtungszeit[s]
dt = 0.05 #Intervall[s]
t = np.arange(t_span[0], t_span[1], dt)
phi_0 = 0.1 #Anfangswinkel[deg]
phi=phi_0*cos(np.sqrt(g/l)*t)
plt.plot(phi)
x = l * sin(phi)
y = -l * cos(phi)
fig, ax = plt.subplots()
line, = ax.plot([], [], 'o-', linewidth=2)
def animation(i):
thisx = [0, x[i]]
thisy = [0, y[i]]
line.set_data(thisx, thisy)
return line,
ani = FuncAnimation(fig, animation, frames=np.arange(0, len(t)), interval=25, blit=True)
ax.set_xlim(-l,l)
ax.set_ylim(-l,l)
ax.set_aspect('equal')
ax.grid()
ani.save('pendulum.gif', writer='pillow', fps=15)
plt.show()
Vibration
g = 10 #Schwerkraftbeschleunigung[m/s^2]
l = 1 #Pendellänge[m]
def models(t, state):#Bewegungsgleichung
dy = np.zeros_like(state)
dy[0] = state[1]
dy[1] = -(g/l)*sin(state[0])
return dy
t_span = [0,20] #Beobachtungszeit[s]
dt = 0.05 #Intervall[s]
t = np.arange(t_span[0], t_span[1], dt)
phi_0 = 90.0 #Anfangswinkel[deg]
omega_0 = 0.0 #Anfangswinkelgeschwindigkeit[deg/s]
state = np.radians([phi_0, omega_0]) #Ausgangszustand
results = solve_ivp(models, t_span, state, t_eval=t)
phi = results.y[0,:]
plt.plot(phi)
x = l * sin(phi)
y = -l * cos(phi)
fig, ax = plt.subplots()
line, = ax.plot([], [], 'o-', linewidth=2) #Zeichnen Sie, indem Sie dieser Linie nacheinander Koordinaten zuweisen
def animation(i):
thisx = [0, x[i]]
thisy = [0, y[i]]
line.set_data(thisx, thisy)
return line,
ani = FuncAnimation(fig, animation, frames=np.arange(0, len(t)), interval=25, blit=True)
ax.set_xlim(-l,l)
ax.set_ylim(-l,l)
ax.set_aspect('equal')
ax.grid()
plt.show()
ani.save('pendulum.gif', writer='pillow', fps=15)

Kapitel 2
 Unter der Annahme, dass die Koordinaten der Verpfändungspunkte ($ x_1, y_1 ) bzw. ( x_2, y_2 $) sind, ist die kinetische Energie dieses Systems
Unter der Annahme, dass die Koordinaten der Verpfändungspunkte ($ x_1, y_1 ) bzw. ( x_2, y_2 $) sind, ist die kinetische Energie dieses Systems
T=\frac{m_1}{2}(\dot{x_1}^2+\dot{y_1}^2)+\frac{m_2}{2}(\dot{x_2}^2+\dot{y_2}^2)
Die Energie der Position
U=m_1gy_1+m_2gy_2
Auch die Bindungsbedingungen sind
x_1^2+y_1^2=l_1^2,
(x_2-x_1)^2+(y_2-y_1)^2=l_2^2
Ist. Es ist notwendig, Lagranges unentschlossene Konstante zu verwenden, um die kinetische Gleichung für Lagrange zu lösen. Daher werden wir auch in diesem Fall Polarkoordinaten verwenden.
x_1=l_1\sin \theta_1
y_1=l_1\cos \theta_1
x_2=l_1\sin \theta_1+l_2\sin \theta_2
y_2=l_1\cos \theta_1+l_2\cos \theta_2
Da $ l_1 und \ l_2 $ konstant sind, ist jedes zeitdifferenziert.
\dot{x_1}=l_1\dot{\theta_1}\cos \theta_1
\dot{y_1}=-l_1\dot{\theta_1}\sin \theta_1
\dot{x_2}=l_1\dot{\theta_1}\cos \theta_1+l_2\dot{\theta_2}\cos \theta_2
\dot{y_2}=-l_1\dot{\theta_1}\sin \theta_1-l_2\dot{\theta_2}\sin \theta_2
Übungsenergie
T_1=\frac{m_1}{2}l_1^2\dot{\theta_1}^2(\sin^2\theta_1+\cos^2\\theta_1)=\frac{m_1}{2}l_1^2\dot{\theta_1}^2
T_2=\frac{m_2}{2}[(l_1\dot{\theta_1}\sin\theta_1 +l_2\dot{\theta_2}\sin\theta_2 )^2+(-l_1\dot{\theta_1}\cos\theta_1-l_2\dot{\theta_2}\cos\theta_2 )^2]
\ =\frac{m_2}{2}(l_1^2\dot{\theta_1}^2\sin^2\theta_1+2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin\theta_1\sin\theta_2+l_1^2\dot{\theta_2}^2\sin^2\theta_2+l_1^2\dot{\theta_1}^2\cos^2\theta_1+2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos\theta_1\cos\theta_2+l_1^2\dot{\theta_2}\cos^2\theta_2)
\ =\frac{m_2}{2}
(l_1^2\dot{\theta_1}^2+2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos(\theta_1-\theta_2)+l_1^2\dot{\theta_2}^2)
T=T_1+T_2=\frac{m_1+m_2}{2}l_1^2\dot{\theta_1}^2+\frac{m_2}{2}(2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos(\theta_1-\theta_2)+l_1^2\dot{\theta_2}^2)
Die Energie der Position
U_1=-m_1gl_1\cos\theta_1
U_2=-m_2g(l_1\cos\theta_1+l_2\cos\theta_2)
U=U_1+U_2=-(m_1+m_2)gl_1\cos\theta_1-m_2gl_2\cos\theta_2
Deshalb Lagrange
L=T-U=\frac{m_1+m_2}{2}l_1^2\dot{\theta_1}^2+\frac{m_2}{2}(2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos(\theta_1-\theta_2)+l_2^2\dot{\theta_2}^2)+(m_1+m_2)gl_1\cos\theta_1+m_2gl_2\cos\theta_2
Um die Bewegungsgleichung von Euler Lagrangian zu finden
\frac{\partial L}{\partial \theta_1}=-m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)+(m_1+m_2)gl_1\sin\theta_1
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_1}}=\frac{d}{dt}[(m_1+m_2)l_1^2\dot{\theta_1}+m_2l_1l_2\dot{\theta_2}\cos(\theta_1-\theta_2)]
\ = (m_1+m_2)l_1^2\ddot{\theta_1}+m_2l_1l_2\ddot{\theta_2}\cos(\theta_1-\theta_2)
\frac{\partial L}{\partial \theta_2}=m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)-m_2gl_2\sin\theta_2
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_2}}=\frac{d}{dt}[m_2l_1l_2\dot{\theta_1}\cos(\theta_1-\theta_2)+m_2l_2^2\dot{\theta_2})]
\ = m_2l_1l_2\ddot{\theta_1}\cos(\theta_1-\theta_2)+m_2l_2^2\ddot{\theta_2}
\therefore
m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)-(m_1+m_2)gl_1\sin\theta_1 = (m_1+m_2)l_1^2\ddot{\theta_1}+m_2l_1l_2\ddot{\theta_2}\cos(\theta_1-\theta_2)
m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)-m_2gl_2\sin\theta_2= m_2l_1l_2\ddot{\theta_1}\cos(\theta_1-\theta_2)-m_2l_2^2\ddot{\theta_2}
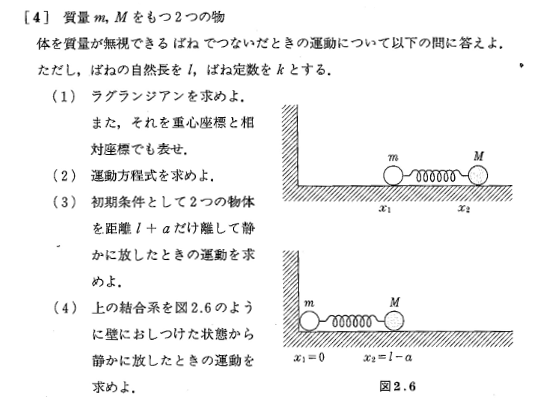
Übungen S.20-21
 (1)
Da die auf das Objekt A ausgeübte Kraft $ (kx) $ ist, ist die Positionsenergie $ U = -kx ^ 2 $, die kinetische Energie $ T = \ frac {1} {2} m \ dot {x} ^ 2 $
Auf das Objekt B $ kmg $, $ U = Mgx $, kinetische Energie $ T = \ frac {1} {2} M \ dot {x} ^ 2 $ ausgeübte Kraft
(1)
Da die auf das Objekt A ausgeübte Kraft $ (kx) $ ist, ist die Positionsenergie $ U = -kx ^ 2 $, die kinetische Energie $ T = \ frac {1} {2} m \ dot {x} ^ 2 $
Auf das Objekt B $ kmg $, $ U = Mgx $, kinetische Energie $ T = \ frac {1} {2} M \ dot {x} ^ 2 $ ausgeübte Kraft
Deshalb,
L=\frac{1}{2}(m+M)\dot{x}^2-\frac{1}{2}kx^2+Mgx
Nächster
$ \frac{\partial L}{\partial \dot{x}}=(m+M)\dot{x}$
$ \frac{d}{dt}\frac{\partial L}{\partial \dot{x}}=(m+M)\dot{x}$
$ \frac{\partial L}{\partial x}=-kx+Mg$
Mehr Lagrange-Bewegungsgleichung
((m+M)\ddot{x}=-kx+Mg or (m+M)\ddot{x_1}=kx_1 (1)
Wobei $ x_1 = -x + Mg / k $
Da die allgemeine Lösung von Gleichung (1) $ A \ sin (\ omega t + \ alpha) $ ist
x_1=A \sin(\omega t + \alpha) (2)
\dot{x_1}=\omega A \cos(\omega t + \alpha) (3)
Wenn $ t = 0 $
$ x = 0 $, also $ x_1 = -Mg / k $,
$ \ dot {x} = 0 $, also $ \ dot {x_1} = 0 $
x_1(0)=A \sin(\alpha)=-Mg/k
\dot{x_1(0)}=\omega A \cos( \alpha)=0
\ cos (\ alpha) = 0 $ für $ \ omega A \ cos (\ alpha) = 0
\therefore \alpha=90^o
x_1(0)=A\sin(90^O)=A=-\frac{Mg}{k},
\therefore A=-Mg/k
\frac{\partial x_1}{\partial t} = -\omega \frac{Mg}{k} \cos(\omega t + \alpha)
x_1=-\frac{Mg}{k} \sin(\omega t+90^o)
\frac{\partial x_1}{\partial t} = -\omega \frac{Mg}{k} \cos(\omega t + \alpha)
\frac{\partial \dot{x_1}}{\partial t^2} = -\omega^2 \frac{Mg}{k} \sin(\omega t + \alpha)=x_1\omega^2
\ddot{x_1}=-x_1 \omega^2
Daher aus (1)
-\omega^2(m+M)x_1=-kx_1
\omega=\sqrt{\frac{k}{m+M}}
x=\frac{M}{k}g(1-\cos\sqrt{\frac{k}{m+M}}t)
(1)
In relativen Koordinaten
Die Kraft, die auf das Versprechen wirkt
F=-kdx=k(l-x_2-x_1)
Potenzielle Energie
U=\frac{1}{2}k(l-x_2-x_1)^2
Übungsenergie
T=\frac{1}{2}m\dot{x_1}^2+\frac{1}{2}M\dot{x_2}^2
U=\frac{1}{2}k((l-x)^2
Wird sein. Deshalb,
L=T-U=\frac{1}{2}m\dot{x_1}^2+\frac{1}{2}M\dot{x_2}^2-\frac{1}{2}k((l-x)^2
In den Koordinaten des Schwerpunkts
Mit $ X = \ frac {mx_1 + Mx_2} {m + M} $ als Schwerpunkt ist $ x = x_2-x_1 $, $ \ dot {X} = \ frac {m \ dot {x_1} + M \ dot { x_2}} {m + M} $
\dot{X}^2=\frac{m^2\dot{x_1}^2+2mM\dot{x_1}\dot{x_2}+M^2\dot{x_2}^2}{(m+M)^2}
Weil es wird
T=\frac{1}{2}m\dot{x_1}^2+\frac{1}{2}M\dot{x_2}^2
\ \ =\frac{1}{2}(m+M)\dot{X}^2+\frac{1}{2}\frac{mM}{m+M}\dot{x}^2
Wird sein. Deshalb
L=\frac{1}{2}(m+M)\dot{X}^2+\frac{1}{2}\frac{mM}{m+M}\dot{x}^2-\frac{1}{2}((l-x_2-x_1)^2
(2)
Lagranges Bewegungsgleichung
$\frac{d}{dt}\frac{\partial L}{\partial \dot{x_i}} = \frac{\partial L}{\partial x_i} $
Weil es dargestellt wird durch
In relativen Koordinaten
M\ddot{x_2}=k(l-x)
In den Koordinaten des Schwerpunkts
(M+m)\ddot{X}=0
\frac{mM}{m+M}\ddot{x}=k(l-x)
(3)
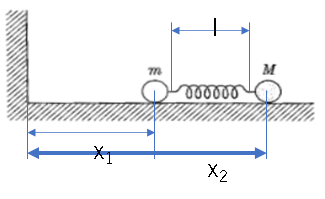
Das Trennen von zwei Objekten durch einen Abstand von $ l + a $ bedeutet $ x_2-x_1-l = a $. Wenn Sie also $ (M + m) \ ddot {X} = 0 $ einmal integrieren
\dot{X}=C
Wenn Sie wieder integrieren
X=Ct+D
Daher bewegt es sich linear mit der Zeit.
Ebenfalls,
$ \ frac {mM} {m + M} \ ddot {x} = -k ((l-x) $ bis $ A sin (wt + \ alpha) $
Wenn $ x_3 = x-l $, dann ist $ x_3 (t) = A sin (wt + \ alpha) $
Deshalb
\dot{x_3}(t)=-w A cos(wt+\alpha)
\ddot{x_3}(t)=-w^2 A sin(wt+\alpha)=-w^2 x_3
\frac{mM}{m+M}\ddot{x_3}=\frac{mM}{m+M}(-w^2 x_3)=-kx_3
Deshalb,
$w^2=\frac{k(m+M)}{mM} $
deshalb
$w=\sqrt{\frac{k(m+M)}{mM}} $
x_3=A sin (wt+\alpha)
Wenn $ t = 0 $
$ x_3 (0) = A sin (\ alpha) = 1 $ Daher ist $ A = a $
$ \ dot {x_3} (0) = w A cos (\ alpha) = 0 $ Daher ist $ \ alpha = 90 ^ o $
Deshalb
x_3=A sin (wt+90^o)=a cos(wt)=a cos(\sqrt{\frac{k(m+M)}{mM}}t)
\because
x=a cos(\sqrt{\frac{k(m+M)}{mM}}t)+l
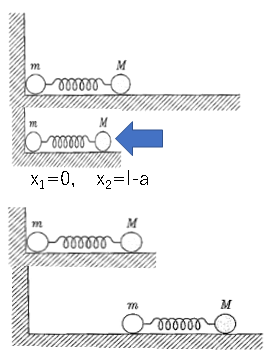
Bis sich das Versprechen von der Wand entfernt
In relativen Koordinaten
$T=\frac{1}{2}M\dot{x_2}^2 $
U=\frac{1}{2}l(l-x_2)
Wird sein. Deshalb
L=\frac{1}{2}M\dot{x_2}^2-\frac{1}{2}(l-x_2)
Lagranges Bewegungsgleichung
M\ddot{x_2}=-k(x_2-l)
Wenn $ x_3 = l-x_3 $
M\ddot{x_3}=kx_3
Deshalb,
x_3(t)=A sin (wt+\alpha)
\dot{x_3}(t)=-wA cos (wt+\alpha)
\ddot{x_3}(t)=-w^2A sin (wt+\alpha)=-w^2 x_3
M \ddot{x_3}=M(-w^2x_3)=-kx_3
\because \ w=\sqrt{\frac{k}{M}}
Wenn $ t = t_0 $
$ A sin (w t_0 + \ alpha) = a $ dann $ A = a $ und $ \ alpha = \ pi / 2 $
Deshalb,
w t_0 +\alpha=\pi \because t_0=\frac{\pi}{2}\sqrt{\frac{M}{k}}
Nach $ t_0 $ wird die Übung in (2) berechnet. Ersetzen Sie es jedoch durch $ t = t-t_0 $.
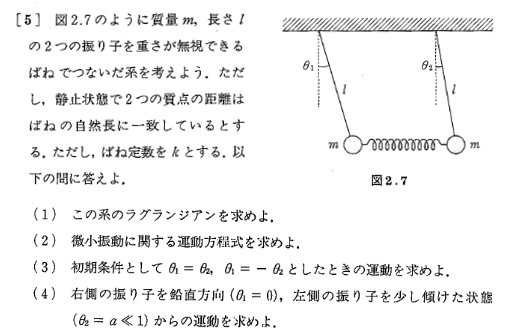
(1)
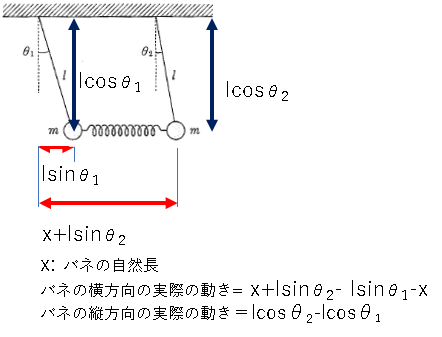
Position der Qualitätspunkte entlang der x-Achse:
x_1=l \cdot sin \theta_1
x_2=x+l \cdot sin \theta_2
Position der Qualitätspunkte entlang der y-Achse:
y_1=l \cdot cos \theta_1
y_2=l \cdot cos \theta_2
Daher ist die Zeitdifferenzierung erster Ordnung
\dot{x_1}=-l \cdot cos \theta_1 \dot{\theta_1}
\dot{x_2}=-l \cdot cos \theta_2 \dot{\theta_2}
\dot{y_1}=l \cdot sin \theta_1 \dot{\theta_1}
\dot{y_2}=l \cdot sin \theta_2 \dot{\theta_2}
Daher ist die kinetische Energie
$ \frac{1}{2}m(\dot{x_1}^2+\dot{x_2}^2+\dot{y_1}^2+\dot{y_2}^2)=$
$ \frac{1}{2}ml^2(\cdot cos^2 \theta_1 \dot{\theta_1}^2+\cdot cos^2 \theta_2 \dot{\theta_2}^2+
\cdot sin^2 \theta_1 \dot{\theta_1}^2+\cdot sin^2 \theta_2^2 \dot{\theta_2}^2)=
\frac{1}{2}ml^2 (\dot{\theta_1}^2+\dot{\theta_2}^2)$
Die potentielle Energie der Feder
U_1=\frac{1}{2}k(x_2-x_1)^2+(y_2-y_1)^2=\frac{1}{2}kl^2[(sin \theta_2-sin \theta_1)^2+(cos \theta_2-cos \theta_1)^2]
Die Energie der Position
U_2=mg(y_1+y_2)=mgl(cos \theta_1+ cos \theta_2)
Deshalb Lagrange
L=\frac{1}{2}ml^2(\dot{\theta_1}^2+\dot{\theta_2}^2)+mgl(cos \theta_1+ cos \theta_2)-\frac{1}{2}kl^2[(sin \theta_2-sin \theta_1)^2+(cos \theta_2-cos \theta_1)^2]
(2)
Da es sich um eine winzige Schwingung handelt, kann $ \ theta_1 <1, \ \ theta_2 <1, \ omega_g ^ 2 = g / l, \ omega_k ^ 2 = k / m $ als $ sin \ theta = \ theta $ angenähert werden. Von
Die potentielle Energie der Feder
U_1=\frac{1}{2}kl^2(\theta_2-\theta_1)^2
Ebenfalls,
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_1}}=ml\ddot{\theta_1}
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_2}}=ml\ddot{\theta_2}
\frac{\partial U_1}{\partial \theta_1}=-kl^2(\theta_2-\theta_1)
\frac{\partial U_1}{\partial \theta_2}=kl^2(\theta_2-\theta_1)
\frac{\partial U_2}{\partial \theta_1}=-mgl sin\theta_1=-mgl\theta_1
\frac{\partial U_2}{\partial \theta_1}=-mgl sin \theta_2=-mgl\theta_2
Deshalb,
\ddot{\theta_1}=\omega_g^2\theta_1-2\omega_k^2(\theta_2-\theta_1)
\ddot{\theta_2}=\omega_g^2\theta_2+2\omega_k^2(\theta_2-\theta_1)
(3)
Wenn der Anfangswert $ \ theta_1 = \ theta_2 $ ist, bewegen sich die beiden Qualitätspunkte in dieselbe Richtung. Addieren Sie daher die obigen Formeln.
\ddot{\theta_1}+\ddot{\theta_2}=-\omega_g^2(\theta_1+\theta_2)
Daher ist die Winkelfrequenz $ \ omega = \ omega_g $
Wenn der Anfangswert $ \ theta_1 = - \ theta_2 $ ist, bewegen sich die beiden Qualitätspunkte in entgegengesetzte Richtungen, sodass der Unterschied zwischen den obigen Gleichungen beträgt
\ddot{\theta_1}-\ddot{\theta_2}=-\omega_g^2(\theta_1-\theta_2)-2\omega_k^2(\theta_1-\theta_2)
Daher ist die Winkelfrequenz $ \ omega = \ sqrt {\ omega_g ^ 2 + 2 \ omega_k ^ 2} $
Wird sein.
(4)
Da der Anfangswert $ \ theta_1 = 0, \ \ theta_2 = a $ ist, behält die Summe der Federwinkel $ a $ bei, so dass $ \ theta_1 + \ theta_2 = a $ die Winkeldifferenz ist
Behalte $ \ theta_1- \ theta_2 = -a $.